|
Nota: Se você não está familiarizado com a eletrônica básica, pode achar mais fácil seguir partes deste capítulo se ler primeiro o capítulo 12.
O COP = 3.4 Gerador de Pulsado-Volante do Lawrence Tseung. Geralmente não se percebe que o excesso de energia pode ser obtido pela pulsação de um volante ou outro dispositivo gravitacional.  Este fato foi recentemente enfatizado por Lawrence Tseung, que se refere à energia extra obtida dessa maneira como sendo energia de “saída”. Essa característica gravitacional faz parte dos cursos de Engenharia da universidade há décadas, onde foi ensinado que o estresse de carga em uma ponte causado por uma carga rolando pela ponte é muito menor do que o estresse causado se a mesma carga fosse repentinamente lançada sobre a ponte. Essa tecnologia de impulso já é conhecida há algum tempo e é site , mas Lawrence aponta o potencial para usá-la como um método para ganhando energia em excesso para uso prático. Em outubro de 2009, Lawrence e seu bando de ajudantes realizaram demonstrações públicas de um protótipo de sistema de pulsação elétrica que produz energia de saída excessiva de COP = 3,3, ou seja, 3,3 vezes mais energia de saída do que o usuário tem que colocar nele trabalhos:  Vídeo. Lawrence está ocupado desenvolvendo este dispositivo ainda mais como ele pretende construir um com um excesso de energia de saída de vários quilowatts. Por trás desse dispositivo está a teoria "Lead-out" de Lawrence e, para isso, ele sugere um arranjo simples para demonstrar o princípio. Ele apresenta o caso de um rotor que tem dois pesos substanciais contidos em dois cilindros ligados ao rotor:  Quando o disco gira, a bola cai pelo comprimento do tubo. Em uma extremidade, o tubo tem uma tampa rígida que causa um impacto significativo quando a bola bate nela. A outra extremidade do tubo é acolchoada e amortece o impacto que causa um desequilíbrio líquido nos impactos e que mantém a rotação. Há uma implementação de protótipo no YouTube, mas a implementação não é adequada e o disco para de rodar após cinco minutos. O slot de vídeo do YouTube está localizado aqui e há dois problemas significativos com essa construção específica. Em primeiro lugar, a rotação do tubo é muito lenta para ser eficaz e em vez do peso cair sob gravidade e acelerar a uma boa velocidade antes do impacto, o peso apenas rola suavemente por uma inclinação menor e não causa um grande impacto. Em segundo lugar, os pesos são muito pequenos para o tamanho da roda e existem apenas dois pesos que fornecem impactos muito espaçados à medida que a roda gira apenas lentamente. Um homem fez uma versão de dez pés e girou firmemente por dez meses, após o que sua esposa insistiu que fosse desmontado, pois era muito barulhento. Eu sugeriria algumas modificações na roda, já que Lawrence está muito ocupado com o desenvolvimento de sua implementação de pulso de COP>1. Em primeiro lugar, o movimento de cada peso deve ser atrasado até que o tubo fique bem mais próximo da vertical. Isto pode ser conseguido curvando parte do tubo assim:  Desta forma, a bola não começa a rolar até que a parte principal do tubo esteja quase na vertical. Isso permite uma aceleração e um impacto muito maiores. A bola ponderada deve ser muito maior, digamos 2 "(50 mm) de diâmetro e feita de chumbo, para gerar um empuxo significativo. Além disso, as extremidades acolchoadas dos tubos devem estar alinhadas com o eixo da roda, para que qualquer o impacto residual não gera uma força de giro na direção errada, há um efeito de giro negativo devido ao braço de alavanca do peso inferior.Esta força de giro só existe para um pequeno arco de rotação, pois o peso rolará para dentro o mais rápido possível a seção do tubo se eleva acima da horizontal e como o tubo transita em uma curva circular, o movimento para dentro é suave, provavelmente seria melhor se os tubos fossem inclinados um pouco mais no sentido horário, em vez de exatamente como mostrado no diagrama. Em segundo lugar, deve haver oito tubos no disco, quatro em cada lado e um lado escalonados em 45 graus para que haja um impacto de direção a cada 45 graus, em vez dos 180 graus da versão mostrada no vídeo do YouTube. Com esse arranjo de quatro vezes mais impactos, cada um substancialmente maior e sem impactos reversos significativos, a roda tem uma chance muito maior de rotação bem-sucedida sem precisar ser particularmente grande. A roda em si não deve ser leve, pois atua como um volante e um volante pulsado já foi mostrado para produzir energia em excesso. Os rolamentos das rodas devem ser de esferas e não de tipo fechado, porque esses são preenchidos com graxa e têm uma séria resistência à rotação. Em vez disso, a variedade de rolamentos de esferas de lado aberto deve ser usada quando eles rodam muito livremente. Usando tubos retos para ilustração, cada tubo poderia ser assim:  Aqui, um disco de madeira é colocado em cada extremidade de um pedaço de tubo de plástico e mantido firmemente no lugar com parafusos ou parafusos que passam através de pequenos orifícios perfurados no tubo de plástico e aparafusam no disco de madeira. Um pedaço de esponja espessa é colado ao disco em uma extremidade e o peso pesado dentro do tubo não é um ajuste apertado para que ele possa se mover muito livremente dentro do tubo. Quatro desses tubos são instalados em cada lado de cada disco usado no dispositivo, como mostrado aqui:  Os quatro tubos ligados à parte de trás do disco estão a 45 graus dos tubos montados na frente do disco. Cada tubo é preso firmemente no lugar com alças que passam pelo disco e são presas no lado oposto. Os tubos também podem ser colados no lugar para fortalecer ainda mais o anexo. Estes oito tubos dão um impacto desequilibrado a cada 45 graus de rotação. Se dois desses discos estiverem conectados a um eixo de rotor comum, o segundo disco poderá ser posicionado a 22,5 graus em torno do primeiro. Esse arranjo dá um impacto desequilibrado para cada 22,5 graus de rotação. Se três discos fossem colocados em um eixo de rotor comum e uniformemente posicionados, haveria um impacto desequilibrado a cada 15 graus de rotação, que é de 24 impactos por rotação. Um arranjo de dois discos pode se parecer com isso:  Se o rotor girar bem, então valeria a pena anexar uma série de ímãs aos discos, tomando o cuidado de manter cada disco perfeitamente balanceado. Uma ou mais bobinas de núcleo de ar podem ser usadas para determinar se a corrente pode ser extraída do dispositivo sem interromper a rotação. As bobinas não devem ter um núcleo magnético, pois isso causaria um grande arrasto na rotação, quer a corrente estivesse sendo puxada ou não.  Sistema de Volante do Chas Campbell. Recentemente, o Sr. Chas Campbell da Austrália demonstrou ganho de energia elétrica com um sistema de volante que ele desenvolveu:  Mas o que este diagrama não mostra é que algumas das correias de transmissão ficam com folga excessiva. Isso causa uma série rápida de solavancos na unidade entre o motor principal e o volante. Eles ocorrem tão rapidamente que não parecem visíveis quando se olha para o sistema em operação. No entanto, este fluxo de pulsos muito curtos na corrente de transmissão gera uma quantidade considerável de excesso de energia extraída do campo gravitacional. O Chas agora confirmou o excesso de energia colocando o volante em velocidade e alternando a entrada do motor de acionamento para o gerador de saída. O resultado é um sistema autoalimentado capaz de executar cargas extras. Deixe-me explicar o sistema geral. Um motor de 750 Watts de potência (1 HP) é usado para acionar uma série de correias e polias que formam um trem de engrenagens que produz mais do que o dobro da velocidade de rotação no eixo de um gerador elétrico. O intrigante sobre este sistema é que uma maior energia elétrica pode ser extraída do gerador de saída do que parece ser tirada do drive de entrada para o motor. Como pode ser? Bem, a teoria da gravidade do Sr. Tseung explica que se um pulso de energia é aplicado a um volante, então, durante o instante desse pulso, energia excedente igual a 2mgr é alimentada no volante, onde “m” é a massa (peso) do volante , “G” é a constante gravitacional e “r” é o raio do centro de massa do volante, ou seja, a distância do eixo até o ponto em que o peso da roda parece atuar. Se todo o peso do volante estiver na borda da roda, o "r" seria o raio da própria roda. Isso significa que se o volante (que é vermelho nas fotografias a seguir) for acionado suavemente em velocidade constante, então não haverá ganho de energia. No entanto, se a unidade não estiver lisa, o excesso de energia é extraído do campo gravitacional. Essa energia aumenta à medida que o diâmetro do volante aumenta. Também aumenta à medida que o peso do volante aumenta. Também aumenta se o peso do volante estiver tão concentrado em direção ao aro do volante quanto possível. Também aumenta, quanto mais rápido os impulsos são aplicados ao sistema. No entanto, Jacob Bitsadze aponta que outro mecanismo entra em jogo mesmo se todas as correias estiverem corretamente tensionadas. O efeito é causado pela aceleração interna perpétua do material do volante, devido ao fato de ele girar em uma posição fixa. Ele se refere a ela como sendo "a regra do ombro de Arquimedes", que não é algo com o qual eu esteja familiarizado. O ponto importante é que o sistema de Chas Campbell é autoalimentado e pode alimentar outros equipamentos. Agora dê uma olhada na construção que Chas usou:  Você percebe que ele não apenas tem um volante pesado de tamanho razoável, mas também que há três ou quatro discos de grande diâmetro montados onde eles também giram nas velocidades intermediárias de rotação. Embora esses discos possam não ter sido colocados lá como volantes, eles atuam como volantes, e cada um deles estará contribuindo para o ganho de energia livre do sistema como um todo. Um vídeo de replicação com 750 watts de entrada e 2340 watts de saída está aqui e esta implementação não parece ter um volante pesado como você pode ver nesta foto, embora a maior roda de polia parece ter um peso considerável: 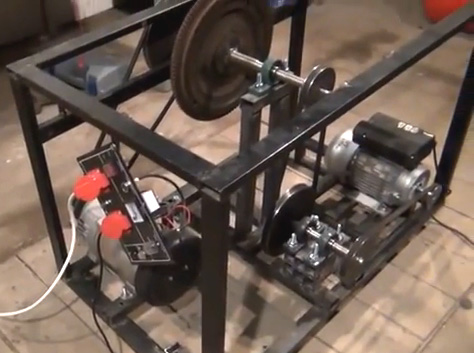 Análise de Jacob Byzehr. Em 1998, Jacob apresentou um pedido de patente para um projeto do tipo mostrado por Chas Campbell. Jacob analisou a operação e chama a atenção para um fator-chave de design:  Jacob afirma que uma característica muito importante para o alto desempenho com um sistema desse tipo é a relação entre os diâmetros das polias de acionamento e de retirada no eixo que contém o volante, especialmente com sistemas onde o volante gira em alta velocidade. A polia motriz precisa ser três ou quatro vezes maior que a polia de tomada de força. Utilizando o motor Chas de 1430 rpm e um gerador de 1500 rpm comumente disponível, o avanço de 12: 9 até o eixo do volante proporciona uma velocidade satisfatória ao gerador, fornecendo uma relação de 3,27 entre a polia de transmissão de 9 polegadas de diâmetro e o diâmetro de 2,75 ” polia de tomada de força. Se um gerador que foi projetado para o uso de gerador eólico e que tem potência de saída de pico a apenas 600 rpm é usado, então uma relação de diâmetro de polia ainda melhor pode ser alcançada. O Gerador Auto-alimentado de José Luis García del Castillo. Em 1998, a patente espanhola ES 2,119,690 foi concedida a José Luis García del Castillo. Eu suspeito que os geradores auxiliares mostrados na patente estão lá apenas para obter a patente aceita pelo examinador de patentes, ao invés de serem realmente necessários. Se isso estiver correto, então o design é quase o mesmo que o design de Chas Campbell, embora construído de uma forma mais compacta:  Como Jacob Byzehr aponta, um ganho de energia é obtido através da aceleração inercial causada por ter a roda de polia “A” presa ao eixo do volante, maior que a roda de polia “B” presa ao eixo do gerador. Como desenhado, há uma grande diferença nesses diâmetros. Aqui está uma tentativa de tradução da patente: SISTEMA DE REGENERAÇÃO DE ENERGIA AUTÓNOMA  Abstrato O sistema compreende um motor elétrico (1), um gerador principal (2), geradores auxiliares (3), uma bateria (4), um regulador de carga (5) e um regulador de velocidade (6). O sistema destina-se a gerar seu próprio poder operacional e fornecer uma fonte extra para outros fins. DESCRIÇÃO Campo de Invenção A presente invenção refere-se a um sistema autônomo de regeneração de energia, que além disso tem várias vantagens apresentadas abaixo. Antecedentes da Invenção Sabe-se há muitos anos como construir máquinas que possam gerar corrente elétrica. Estes são conhecidos pelo nome genérico de "geradores de energia elétrica", consistindo de máquinas rotativas que transformam energia mecânica em energia elétrica como resultado de ação alternativa entre um campo magnético e um condutor em movimento. No entanto, os vários tipos de gerador que compõem o atual estado da técnica requerem a ajuda de um motor, que transforma energia mecânica em energia elétrica, e esse motor requer uma fonte de energia independente que deve ser fornecida continuamente. Assim, um sistema capaz de gerar a sua própria fonte de energia, bem como fornecer uma fonte de energia extra para outros fins, não é conhecido no atual estado da técnica. Sumario da Invenção O requerente da presente patente projetou um sistema de regeneração de energia autônomo, capaz de produzir sua própria energia operacional além de gerar um excedente que pode ser usado em redes elétricas usando conversores de tensão necessários para qualquer instalação elétrica, seja em residências, escritórios , armazéns, etc., é possível chegar a lugares onde é difícil instalar a rede elétrica, permitindo seu uso como uma fonte alternativa de energia que não seja solar ou eólica. Outras aplicações seriam no campo automotivo, como uma fonte de energia para motocicletas, carros, etc., conectando o sistema ao motor propulsor, e assim conseguindo o movimento necessário do veículo. No geral, o sistema é composto pelos seguintes componentes básicos:
O motor de acionamento elétrico fornece a força eletromotriz necessária para o sistema operar, o gerador fornece energia ao sistema, carregando a bateria e fornecendo energia direta ao motor de tração quando necessário, ou se a bateria estiver totalmente carregada, então apenas para energizar o motor. Ele pode fornecer energia mecânica direta usando polias e correias, engrenagens ou qualquer outro meio. Os geradores auxiliares são responsáveis pelo fornecimento de energia de reserva e podem usar propulsores ou ser na forma de uma turbina operando pela ação do vento ou por engrenagens conectadas a um volante colocado no motor de tração. A função da bateria é fornecer a energia necessária para ligar o motor e, além disso, fornecer qualquer potência extra que o motor possa precisar durante a operação. A bateria é recarregada pelo gerador principal que é acionado diretamente pelo motor. A função do controlador de carregamento é evitar que a bateria fique sobrecarregada. A função do controlador de velocidade é controlar a velocidade do motor de acionamento. A presente invenção oferece as vantagens descritas acima, bem como outras que serão compreendidas a partir da forma de realização exemplificativa do sistema descrito em detalhe abaixo, para facilitar a compreensão das características mencionadas acima, e introduzindo ao mesmo tempo vários, para além da presente especificação. Deve ser entendido que os desenhos são apenas a título de exemplo e não limitam o âmbito da presente invenção em nenhum aspecto, sendo apenas um exemplo de uma forma de construção. Breve descrição dos desenhos Nos desenhos: A Fig. 1 é um diagrama do sistema como um exemplo de uma forma de realização prática da invenção.  A Fig. 2 mostra uma forma de realização alternativa desta invenção.  Descrição de uma Forma de Realização Preferida desta Invenção. Como mostrado no desenho, o sistema autónomo de regeneração de energia, de acordo com uma forma de realização da presente patente, compreende um motor de tracção eléctrica (1), um gerador principal (2), vários geradores auxiliares (3), uma bateria ou acumulador (4), um controlador de carga e fonte de alimentação (5) e um controlador de velocidade do motor (6).  O motor de acionamento elétrico (1) fornece a força eletromotriz necessária para operar o sistema, e sua voltagem e potência são selecionadas de acordo com o tamanho do sistema que você deseja construir. O gerador principal (2) fornece energia ao sistema, em primeiro lugar, para recarregar a bateria (4) e, em segundo lugar, direciona a energia para o motor (1) se for necessário. Quando a bateria (4) está totalmente carregada, sua carga é mantida pela energia do motor, fornecida por polias adequadas ou outro método de transmissão de energia mecânica. A velocidade de rotação do gerador deve ser organizada através da escolha da engrenagem entre o motor e o gerador, de modo que quando o motor estiver operando em sua velocidade máxima e puxando sua corrente máxima, o gerador esteja girando rápido o suficiente para fornecer a corrente. . O gerador principal (2) será conectado eletricamente à bateria (4) e mecanicamente ao motor (1). Os geradores auxiliares (3), estão na forma de uma turbina, operando por ação do vento ou por engrenagens presas a um volante (7), acionado pelo motor (1), como mostrado na Fig.2. Esses geradores auxiliares (3) fornecem energia de reserva para o sistema. A bateria (4) deve ter uma capacidade que exceda a potência máxima do motor (1), e sua função no sistema é fornecer a energia necessária para ligar o motor (1) e fornecer qualquer energia extra que o motor (1), pode precisar durante a operação. A bateria é recarregada diretamente pelo gerador principal (2) que é acionado pelo motor (1). O controlador de carga e o distribuidor de energia (5) estão posicionados entre o gerador principal (2), os geradores auxiliares (3) e a bateria (4). Seu trabalho é regular o consumo de corrente da bateria (4), para evitar o consumo excessivo de corrente. Também distribui qualquer energia excedente como alimentação direta ao gerador (2) e ao motor de acionamento (1) quando precisa de corrente adicional. Os geradores auxiliares (3) podem fornecer energia adicional ao motor (1), ou sua potência pode ser usada para qualquer outra necessidade de energia. O regulador de velocidade (6), destina-se a regular a velocidade do motor (1), este ajuste é gradual e é ajustado para corresponder ao uso pretendido do sistema. As aplicações do sistema podem ser muitas e diversas, dignas de nota, entre as quais estão as utilizações no campo automóvel, onde podem ser utilizadas como meios de propulsão de automóveis e outros veículos motorizados, com o motor (1) ligado a uma roda motriz que impulsiona o veículo. Nestas aplicações, os geradores auxiliares (3), podem ser equipados com hélices ou ser em forma de turbina, de modo que o vento que passa fornece energia extra ao sistema elétrico. Com veículos elétricos, somente o gerador principal é conectado a uma roda motriz. Outras aplicações para este sistema são no campo do fornecimento de energia, isto é, uso em redes elétricas. A vantagem de usar este sistema patenteado é que a fonte de alimentação é praticamente inesgotável e limpa, e sujeita apenas ao desgaste do componente durante a operação. Sua operação é a seguinte: A bateria (4) fornece a energia necessária para ligar o motor (1) e permite a possibilidade de aumentar a entrada de energia elétrica em determinados momentos durante a operação do sistema. A bateria (4) é eletricamente conectada ao motor (1) através do controlador de velocidade (6), que é alimentado pelo gerador principal (2) pelo controlador de distribuição de carga (5). O gerador (2), é acionado diretamente pelo motor de acionamento (1), e a transmissão de movimento de um componente para outro é através de engrenagens, correias e polias, ou qualquer outro meio convencional. Os geradores auxiliares (3) são eletricamente conectados ao controlador de carregamento (5), e a bateria (4), e seu movimento pelo vento gera sua própria energia, tendo pás ou hélices de turbina, ou sendo girada pelo volante (7) que está ligado diretamente ao motor (1). A energia produzida por esses geradores auxiliares (3) pode ser usada para carregar outras baterias para uso posterior, ou usada diretamente para alimentar outros equipamentos elétricos ou redes de instalações elétricas. Através de conversores de voltagem é possível converter a voltagem produzida pelo sistema em uma voltagem adequada para uso em outros equipamentos. O Gerador CC Auto-alimentado de Wilson. O Sr. Wilson do Texas construiu um sistema gerador auto-alimentado usando uma mesa antiga e algumas peças de carros. Sua construção era instável, mas apesar disso, ele se alimentou e outros equipamentos. A mesa que ele usou era de 1,5 m de diâmetro e 50 mm de espessura, o que significa que pesaria pelo menos 60 Kg, o que é uma quantidade substancial, bem acima da usada por Chas Campbell com seu sistema autoalimentado AC. Nesta construção de corrente contínua, o sistema era acionado por um motor de corrente contínua padrão, não modificado e pronto para uso, alimentado por duas baterias de carro ligadas em paralelo para fornecer uma maior capacidade de corrente. Essas baterias foram mantidas carregadas por dois "geradores" de carros americanos pré-1964 (os mais próximos disponíveis atualmente são os alternadores de ímã permanente). Esses geradores também alimentavam equipamentos adicionais e Wilson destacou que três ou mais geradores poderiam ser operados pelo sistema, gerando um nível substancial de excesso de energia elétrica. A máquina tem que ser descrita como "instável" porque ele escolheu converter o tampo da mesa em um volante de acionamento por correia de polia V, acionando uma série de pregos na borda do disco de madeira, com as unhas dobradas para formar uma abertura em forma de V através do qual ele correu um cinto de polia. Após três dias de corrida contínua, essas unhas começaram a sair, fazendo com que ele desligasse o sistema. Esta unidade foi construída por volta de 1990, e se alguém decidir tentar uma replicação, sugiro que a borda do disco de madeira seja esticada para levar o cinto, em vez de confiar nas unhas. O arranjo foi assim:  Havia também um rolo tensor de correia que não é mostrado no diagrama acima, que assume que o volante foi ranhurado para levar a correia de transmissão. Esquematicamente, o arranjo era assim:  Aqui, a saída adicional pode ser usada diretamente para alimentar equipamentos de 12 volts ou um inversor pode ser usado para fornecer tensão e freqüência da rede elétrica. Um inversor típico se parece com isso:  A energia da bateria é conectada a uma extremidade usando cabos grossos para transportar a corrente pesada, e um ou mais soquetes principais são fornecidos na outra extremidade do gabinete, junto com um interruptor Liga / Desliga e indicadores de energia. Os inversores vêm em muitos tamanhos e potências, geralmente variando de 150 watts a 3.000 watts (3 kW). Os mais caros são especificados como "True Sine-Wave Output", mas muito poucos itens atuais do equipamento não funcionarão bem nas versões mais baratas, que não produzem uma verdadeira saída senoidal. O Sr. Wilson decidiu não patentear seu projeto e, em vez disso, queria que fosse uma informação de código aberto para qualquer um usar livremente. No entanto, a patente de Jesse McQueen mostrada no capítulo 13 parece ser do projeto de Wilson, embora o volante não pareça ser mencionado lá. Deve-se ressaltar que a saída do gerador precisa ser alta e, portanto, os tipos de imãs permanentes são considerados essenciais para esta aplicação. Os métodos especializados de enrolamento do motor (e conseqüentemente, gerador) de 'UFOpolitics' mostrados no capítulo 2, aumentam as eficiências por um fator tipicamente de 300% ou mais, e assim elevariam a produção deste sistema substancialmente se fossem aplicados ao motor ou os geradores, ou ambos. Sistema de Pulsação da Bateria de John Bedini. O sistema Chas Campbell não é um caso isolado. Na página 19 do livro “Geração de energia livre - circuitos e diagramas esquemáticos”, John Bedini mostra um diagrama de um motor / gerador que ele tem operado por três anos continuamente, mantendo sua própria bateria totalmente carregada. No site do John aqui na metade da página, há uma foto em preto e branco de uma versão muito grande desse motor construído por Jim Watson e que tinha uma potência excedente de doze kilowatts. No entanto, apesar do volante no design de John, ele não é usado diretamente para extrair energia da gravidade, embora possa ser feito prontamente. Em vez disso, o design usa um método muito complicado de tentar pulsar o ácido dentro da bateria com pulsos ressonantes. Isso é uma coisa perigosa de se fazer e se a pulsação não estiver exatamente correta, pode fazer a bateria explodir. Estritamente falando, o design perigoso de John não deveria estar neste capítulo sobre sistemas gravitacionais. O projeto de John tem um motor que gira o volante e o eixo do volante gira um disco de alumínio com seis ímãs permanentes embutidos nele. Os ímãs têm seus pólos sul voltados para seis bobinas de 200 voltas helicoidais, cada uma com um fio de 0,8 mm de diâmetro. As bobinas são conectadas em série, então efetivamente é uma bobina de 1200 voltas que é energizada por seis magnetos simultaneamente. John mostra seu mecanismo de comutação como um acessório mecânico montado, mas isolado do eixo do motor. O disco tem apenas um setor condutor de cerca de 100 graus de arco. Isso daria pulsos de duração iguais, exceto pelo fato de que as escovas do comutador têm posições ajustáveis, permitindo que a duração do pulso seja alterada:  Deixe-me enfatizar novamente que o propósito deste sistema não é gravitacional, mas sim uma tentativa de chocar os íons no ácido da bateria em auto-carga através de pulsos ressonantes. Na minha opinião, esta é uma idéia altamente perigosa e, embora possa ser bem-sucedida através do ajuste quase aleatório de posições de contato deslizantes e de um capacitor de sintonia no gerador, eu certamente não aconselharia ninguém a tentar fazer isso. João emite o que ele chama de "avisos severos" contra pessoas inexperientes que tentam fazer isso. Deve ser mencionado que os geradores de motores perfeitamente seguros podem ser construídos - sistemas que têm uma saída elétrica excessiva significativa. Gerador de jato de água auto-alimentado por James Hardy. Conforme descrito em mais detalhes no Capítulo 2 e Capítulo 8, há um dispositivo muito simples baseado em uma bomba de água de alta potência. Neste sistema, uma pequena quantidade de água é bombeada continuamente, no mesmo estilo geral de uma fonte ornamental. A diferença aqui é que um jato de água de alta velocidade é produzido e direcionado para uma roda de turbina. A roda da turbina pode ser de qualquer tipo, como indicado na patente, que James recebeu para este projeto. No vídeo atualmente presente na web, a roda d'água tem um design muito simples e ainda funciona bem - é mostrada aqui:  Pequenos discos são presos à roda em intervalos amplamente espaçados ao redor de sua borda. O jato de água bate neles e aplica um impulso à roda, conduzindo-a ao redor, mas também adicionando energia extra através desses impulsos. A roda d'água é acoplada a um gerador elétrico padrão via polias e correias em V. O sistema é iniciado usando a alimentação da rede elétrica e, em seguida, quando está funcionando a toda velocidade, a alimentação elétrica da bomba é trocada da rede elétrica para a saída do próprio gerador. Isso é exatamente o mesmo que Chas Campbell faz com seu volante pulsado e ambos os sistemas são capazes de alimentar equipamentos elétricos padrão adicionais destinados ao uso principal. O volante do Chas Campbell, o volante de John Bedini e este gerador de jato de água, todos demonstram muito claramente que a energia ambiental está prontamente disponível para usarmos a qualquer momento que escolhermos. Tudo o que é necessário é para nós construirmos um desses dispositivos. A Unidade de Conversão de Amplificação de Energia Centrífuga (“CEACU”) de Donnie Watts. A unidade de James Hardy depende da potência de saída da bomba de água. O motor Clem descrito no capítulo 8 é auto-alimentado, torna-se muito quente em uso, fazendo com que o líquido de trabalho seja de óleo e não de água, e dá a impressão de que a espiral cônica muito difícil de fazer é uma característica essencial. No entanto, é perfeitamente possível fazer um gerador auto-alimentado, muito eficiente, alimentado por uma casa, usando princípios simples. Um grande número de pessoas esteve envolvido no desenvolvimento do qual só tomei conhecimento em julho de 2016. O design é baseado em princípios bem conhecidos e não é nada como bombear uma grande quantidade de energia para o dispositivo. Em vez disso, estamos olhando para uma versão simplificada e melhorada do Clem Engine, que é apenas um único cilindro. Este motor funciona frio e é bastante simples para muitas pessoas poderem construir um. Com um cilindro rotativo de apenas 250 mm (10 polegadas) de diâmetro, uma potência auto-alimentada de dez cavalos de potência pode ser alcançada e dez cavalos de potência são 7,5 quilowatts, então dirigir um gerador com ele alimentaria uma casa. A potência de saída aumenta com o diâmetro do rotor e com a taxa de rotação e, assim, para impedir que o dispositivo acelere até se destruir sozinho, uma válvula de entrada para limitar a entrada de água no cilindro rotativo é um requisito de controle importante. O que precisa ser entendido muito claramente é que esse é um mecanismo de potência exponencial. A potência de saída é proporcional ao quadrado da velocidade de rotação, então duplique a velocidade de rotação e você quadruplica a potência de saída. Além disso, a potência de saída é proporcional ao quadrado do diâmetro do rotor, dobrando o diâmetro e quadruplicando a potência de saída. Portanto, se você dobrar o diâmetro do cilindro do rotor e duplicar a velocidade de rotação, a potência de saída aumentará em um fator de dezesseis. O coeficiente básico de desempenho para o projeto é quatro. Inicialmente, é necessário iniciar o dispositivo com uma bomba de água de 500 watts, mas quando a rotação atinge 60 rpm, o dispositivo não precisa mais da bomba de água, embora ela possa ser deixada em funcionamento, se desejado. A 60 rpm, a pressão no interior do tambor do rotor atinge o ponto em que a sucção causada pela passagem da água pelos jatos do rotor cria uma sucção suficiente para manter a operação. Mas, lembre-se que este é um sistema de feedback positivo, com um aumento na velocidade causando um aumento na potência, um aumento no fluxo de água, um aumento na velocidade de rotação, ... e consequentemente, o motor será auto-alimentado e se você não está pronto para isso com um acelerador na taxa de fluxo de água no cilindro, então o motor está perfeitamente sujeito a acelerar até o ponto em que a pressão interna destrói o motor. Em princípio, o design é assim:  A maioria dos geradores precisa ser girada a 3000 rpm ou um pouco mais rápida. Essa velocidade pode ser alcançada pela engrenagem da correia entre o eixo de saída e o eixo de entrada do gerador. Um gerador desse tipo geral poderia se parecer com essa unidade de 6,5 KVA custando £325 em 2016:  No entanto, a potência de saída deste design pode ser aumentada ainda mais pela inclusão de defletores de empuxo de aço inoxidável no interior do invólucro. A idéia é fazer com que os jatos de água atinjam uma superfície fixa em ângulo reto com o jato e o mais próximo possível do bico do jato:  A versão curvada da placa é teoricamente mais eficiente, mas a diferença é tão pequena que as placas planas são geralmente usadas. Deixe-me salientar que este dispositivo é efetivamente um motor sem combustível com uma saída substancial e pode alimentar veículos em movimento ou executar um gerador elétrico. Pode ser construído em várias configurações diferentes.  O pedido de patente de 25 de setembro de 1989 por Donnie C. Watts descreve o funcionamento do dispositivo: AMPLIFICAÇÃO E CONVERSÃO DE ENERGIA CENTRÍFUGA Descrição da Unidade. A unidade consiste em duas placas de aço circulares com um oitavo de polegada de espessura e quatro pés ou maior de diâmetro, formando o exterior de uma roda. Essas placas são colocadas a seis polegadas de distância em um eixo oco de três polegadas de diâmetro. Entre essas duas placas há quatro pedaços de chapa em forma de V espaçados precisamente para formar raios de seis polegadas que direcionarão a água de buracos no eixo central para o aro externo, enquanto o interior do V formará bolsas de ar entre os raios. As extremidades do V não devem estar a menos de dois centímetros da borda externa da roda. Todas as quatro unidades em forma de V devem ser precisamente colocadas em equilíbrio entre si e seguramente soldadas para manter as bolsas de ar e as bolsas de água separadas. A borda externa da roda é feita de um pedaço de uma folha de oito polegadas de espessura de seis polegadas de largura, formada em um círculo perfeito e soldada com segurança à borda das placas circulares de modo que a área interna esteja completamente fechada. Nesta borda externa, diretamente no centro, são colocados entre quatro e cinquenta jatos de água do tamanho de uma agulha de futebol, inclinados abruptamente para um lado para dar à roda um movimento giratório. (O número ideal de jatos de água na borda externa depende da aplicação, mas o volume de água que é expelido pelos jatos não deve exceder sessenta e seis por cento do volume de água que pode passar pelas aberturas no eixo central. razões para isso são: 1. A saída de água dos jatos seria mais rápida do que a entrada de água na roda, o que resultaria em nenhuma pressão perto da borda externa, pressão essencial para o funcionamento do motor. 2. A água que entra na roda deve ir imediatamente para uma poça de água. Quanto mais tempo permanece um fluxo de água em vez de uma poça de água, mais energia é desperdiçada. Como a água que é ejetada pelos jatos externos é sempre menor do que a quantidade de água disponível para os jatos, ocorrerá um aumento de pressão próximo à borda externa. Um jato de liberação de pressão com mola (não mostrado) deve ser construído na borda externa junto com os outros jatos, mas voltado na direção oposta para evitar que a roda gire mais se a carga (gerador) cair ou não pegar desligue o suficiente para manter a velocidade da roda constante. Existem várias outras maneiras de controlar a velocidade. O eixo central é projetado para ter água em uma extremidade e um gerador elétrico preso à outra extremidade. Entre a entrada de água e o gerador, muito próximo da própria roda, seriam rolamentos de rolos ou de esferas muito robustos apoiados em uma estrutura que segurará a roda a um pé do chão. A água é forçada no eixo por meio de uma bomba de força centrífuga de baixo volume e alta potência, aproximadamente metade do motor de potência, a aproximadamente 20 galões (US) por minuto, dependendo dos requisitos de velocidade e potência. Este motor e bomba de água é principalmente para iniciar a roda CEACU e desde que a energia desta é toda adicionada à potência da roda grande, eu prefiro deixar a bomba funcionando durante a operação. A unidade inteira (dependendo da aplicação) pode ser colocada em um invólucro de contenção que pode ser pressurizado ou evacuado de ar. Se a unidade for operada em um campo aberto, a carcaça externa pode ser pressurizada e a bomba de partida removida ou desligada quando o motor estiver funcionando sozinho. Se a unidade for operada em uma garagem ou perto de uma casa, ela será operada à pressão atmosférica ou no vácuo; nesse caso, é necessário deixar a bomba conectada e funcionando de modo que as bolhas de ar não se formem perto da central eixo. Além disso, o invólucro de contenção deve ser capaz de coletar cerca de dez centímetros de fluido no fundo, esperando para ser reciclado através da roda. Notas importantes sobre o CEACU: 1. A curva de velocidade e potência de um motor auto-energizado é exatamente o oposto de um motor normal. Um motor normal atinge um pico de energia e, em seguida, começa a descer. A curva de potência do CEACU começa com uma subida lenta e depois acelera rapidamente até que a curva da linha de força esteja quase vertical (imediatamente antes da desintegração se o controle de velocidade não estiver sendo usado). O motor CEACU não irá gerar mais energia do que é colocado antes de atingir 60 a 100 rpm, dependendo do projeto e tamanho. 2. À medida que a velocidade aumenta, as bolhas de ar que ocorrem no fluido de trabalho se acumulam nas bolsas de ar. Os bolsões de ar servem apenas para manter a pressão constante e dar uma pressão persuasiva suave que é multidirecional em vez de apenas centrífuga, resultando em uma pressão constante para os jatos. Não é apenas possível ou provável que a unidade se desfaça por sua própria força (se a pressão não for liberada em algum momento ou a energia for retirada); acontece de ser um fato. A pressão do ar acumular-se-á nas bolsas de ar no interior da roda apenas depois de a roda estar a 60 rpm ou mais depressa. 3. O ar pressurizado no aro externo da roda é essencial porque empurra em todas as direções de uma só vez, enquanto a água empurra em apenas uma direção. Em outras palavras, a água forçada centrífuga não está interessada em encontrar o seu caminho através dos jatos, só está interessada em pressionar diretamente contra a borda externa. A água mantém o ar no lugar ao mesmo tempo que o ar está forçando a água através dos jatos, e a água que vem do eixo continua substituindo a água expelida. É por isso que eu continuo dizendo repetidas vezes: “Torne grande o suficiente, torne-o grande o suficiente”. Caso contrário, não seria mais viável do que uma pequena barragem. 4. Para que este motor funcione adequadamente, a água que passa pelos raios não deve ser restringida de forma alguma até atingir o aro externo. É por isso que temos raios de seis polegadas. A água encostada na borda externa não pode se mover rapidamente; queremos que a água permaneça o mais imóvel possível sob tanta pressão quanto possível. 5. Existem dois fatores primários que não devem ser alterados no design desta roda, caso contrário não funcionará: a. Os raios devem ser muito grandes e livres de restrições, porque o líquido em geral tende a se apegar a qualquer coisa que se aproxime. b. A velocidade do giro da roda é essencial para a força centrífuga necessária para acumular a pressão perto do aro externo e, por essa razão, os jatos no aro externo devem ser pequenos em diâmetro e em grande número para que a concentração seja ativada. velocidade em vez de volume (mas não exceder 66% da água que pode entrar no eixo central). 6. Em relação ao fluido de trabalho: Embora tenha sido referido aqui como “água”, o fluido de trabalho pode ser qualquer tipo de fluido de transmissão, óleo, fluido hidráulico, etc., tendo em mente que o fluido de trabalho também deve atuar como um fluido. lubrificante para os rolamentos que devem durar de dez a vinte anos. Eu recomendo fluido de transmissão regular, que eu vi usado sozinho em um motor de carro com resultados de lubrificação bastante comparáveis ao petróleo. 7. Para o leitor que zombaria da energia que pode ser derivada de sistemas pressurizados, ofereço os seguintes fatos: a. Seis meses atrás, foi demonstrado em um programa de TV que uma corrente de água altamente pressurizada do tamanho de uma agulha de futebol (sem aditivos, mas apenas água pura) cortaria uma chapa de aço com uma polegada de espessura. Essa mesma corrente foi usada para cortar uma lista telefônica de duas polegadas de espessura, e cortou tão rápido que não importava a rapidez com que a pessoa que segurava o livro a movia, a corrente fez um corte totalmente limpo através dela. b. Além disso, atualmente no mercado há um motor de ar de turbina fabricado pela Tech Development Inc. de Ohio e tem uma potência de saída de 730, com uma pressão de ar de entrada de 321 psig, a 8400 rpm. Este motor tem apenas 7 polegadas de diâmetro e 14 polegadas de comprimento. Este não é um motor de sobre-unidade, nem está relacionado ao motor da CEACU de forma alguma. Menciono isso apenas para ilustrar o que pode ser feito com sistemas pressurizados. Então, vamos aceitar o fato de que estamos falando muito do potencial, que será encontrado factual e viável no motor da CEACU. 8. As principais diferenças funcionais entre a CEACU e o represamento de um rio são: Criamos nossa própria “gravidade” e pré-determinamos a quantidade dessa gravidade por dois métodos, em vez de apenas um. A gravidade em uma represa só pode ser aumentada pela construção da represa maior; o motor CEACU também pode aumentar a gravidade de trabalho aumentando a rpm. Isso é feito adicionando mais jatos, até o ponto em que 66% da água que entra é ejetada. Usar mais da água disponível do que isso causaria muita turbulência da água dentro da roda. Mas tenha em mente que sempre há muita pressão dentro da roda para fazer o trabalho para o qual foi projetada, desde que seja deixada em alta velocidade suficiente para manter a pressão na borda externa muito alta - exatamente no mesmo sentido. que você não tente decolar em seu carro até que o motor esteja indo em rpm alto o suficiente para lidar com a aplicação de carga.   A única parte difícil deste projeto parece ser o acoplamento deslizante, onde um cano de água estacionário é unido a um cano de água rotativo. Enquanto estamos familiarizados com os aspersores de gramado rotativos que giram usando exatamente os mesmos princípios que este motor Donnie Watts, ou seja, ação de jato de impulso, como mostrado aqui:  O ponto chave é que a taxa de rotação é baixa. Isso é inteiramente intencional, pois o fabricante está considerando a maneira como as várias correntes de água chegam ao solo. Se você considerar a taxa de rotação, o sprinkler mais rápido provavelmente estará girando a menos de 300 rpm, o que pode ser muito mais lento do que o requisito de nosso motor. Pesquisando os vários acoplamentos no mercado, a taxa de rotação citada é tipicamente de 400 rpm ou menos, o que pode ser o motivo pelo qual Donnie cita um tamanho de tambor de rotor tão grande e um tubo de alimentação de 3 polegadas de diâmetro (eixo). Acoplamentos adequados podem ser acoplamento 1 ou acoplamento 2 com capacidade de 2000 rpm:   Vídeo de interesse: www.youtube.com O Pêndulo de ímã permanente. Atualmente, há um pequeno videoclipe no YouTube, mostrando um pêndulo que funciona sem ajuda há dois anos: vídeo e que usa a gravidade e o magnetismo para manter indo. O dispositivo é instalado em uma caixa com lados transparentes:  O próprio pêndulo se parece muito com uma marreta devido ao seu eixo rígido e os ímãs adicionais montados no peso. A imagem acima mostra o pêndulo no final do seu balanço para a direita e a imagem abaixo, na sua extrema posição de balanço da mão esquerda:  O que indica que o balanço cobre uma distância razoavelmente curta. Montados perto do topo do pêndulo, há dois braços articulados que se parecem muito com microfones, devido a ter grandes ímãs montados em suas extremidades mais internas:  O dispositivo funciona assim: o pêndulo balança para a direita e, ao fazê-lo, levanta um imã preso ao eixo do pêndulo por um braço de prata curvado:  Presumivelmente, o braço é curvo para evitar as complicações construtivas no pivô do pêndulo, que seriam causadas por um braço de montagem reto preso ao eixo do pêndulo. O imã ascendente preso ao pêndulo empurra a extremidade magnética do balancim para cima, mesmo que ele não se aproxime dela. O braço oscilante é usado para elevar e abaixar uma placa que possui um ímã montado nela. A elevação e abaixamento é conseguido com dois cordões presos na extremidade do balancim e suas outras extremidades presas aos dois cantos superiores da placa móvel:  A placa desliza em duas fendas na caixa de suporte e o movimento da placa é relativamente pequeno:  A inclinação do braço de alavanca baixa a placa quando o pêndulo se aproxima da placa. Isto introduz um efeito de travagem magnética onde parte do momento do peso do pêndulo é armazenado nos campos magnéticos opostos dos ímans do pêndulo e do íman da placa. Isso freia o movimento do pêndulo e dá um empurrão magnético em seu balanço oposto, sustentando-o balançando dia após dia após dia. Este é um arranjo inteligente e o dispositivo em exibição foi construído com um alto padrão de construção. Não parece ter nenhuma energia adicional decolando, mas parece bastante provável que bobinas de núcleo de ar poderiam ser usadas ao longo do caminho de giro para gerar energia elétrica. O arranjo parece tão próximo do carregador de bateria de pêndulo de John Bedini que pode ser possível usar um pêndulo desse tipo para carregar as baterias, assim como John faz. Embora isso pareça um dispositivo muito simples, é altamente provável que exija o ajuste exato do comprimento dos braços da alavanca, os tamanhos dos espaços magnéticos em relação à força dos ímãs, etc. etc. Provavelmente, são necessários pequenos ajustes repetidos. obter o dispositivo funcionando sem problemas e sustentando o balanço do pêndulo. Tudo em tudo, porém, é um dispositivo muito interessante. Efeitos Gravitacionais. Estamos todos familiarizados com os efeitos da gravidade. Se você deixar cair alguma coisa, ela cai. Engenheiros e cientistas geralmente são da opinião de que o trabalho útil não pode ser executado de forma contínua a partir da gravidade, como, eles apontam, quando um peso cai e converte sua “energia potencial” em trabalho útil, você então tem que colocar muito trabalho para levantar o peso novamente para o seu ponto de partida. Enquanto isso parece ser uma análise sólida da situação, não é verdade. Algumas pessoas afirmam que um dispositivo movido à gravidade é impossível porque, eles dizem que seria uma máquina de "movimento perpétuo", e eles dizem que o movimento perpétuo é impossível. Na verdade, o movimento perpétuo não é impossível, pois o argumento sobre ele impossível é baseado em cálculos que assumem que o objeto em questão é parte de um sistema “fechado”, enquanto, na realidade, é muito improvável que qualquer sistema no universo Na verdade, é um sistema "fechado", já que tudo está imerso em um enorme mar de energia chamado de "campo de energia de ponto zero". Mas isso de lado, vamos examinar a situação real. Johann Bessler fez uma roda gravitacional totalmente funcional em 1712. Uma roda de 300 libras (136 Kg) que ele demonstrou levantando um peso de 70 libras a uma distância de 80 pés, demonstrando um excesso de potência de 5.600 libras-pé. Considerando o baixo nível de tecnologia na época, parece haver muito pouco espaço para que a demonstração seja falsa. Se fosse uma farsa, então o falso em si teria sido uma conquista impressionante. No entanto, Bessler agiu da mesma maneira que a maioria dos inventores, e exigiu que alguém tivesse que pagar uma quantia muito grande de dinheiro pelo segredo de como sua roda da gravidade funcionava. Em comum com os dias atuais, não houve compradores e Bessler levou os detalhes de seu projeto para o túmulo com ele. Não é exatamente uma situação ideal para o resto de nós. No entanto, o principal argumento contra a possibilidade de uma roda gravitacional funcional é a ideia de que, como a gravidade parece exercer uma força direta na direção da Terra, não pode ser usada para realizar qualquer trabalho útil, especialmente desde a eficiência de qualquer dispositivo. será inferior a 100%. Embora seja certamente concordado que a eficiência de qualquer roda seja menor que 100%, como o atrito será definitivamente um fator, não significa necessariamente que uma roda gravitacional bem-sucedida não possa ser construída. Vamos aplicar um pouco de bom senso ao problema e ver quais resultados. Se temos um arranjo de gangorra, onde o dispositivo é exatamente balanceado, com o mesmo comprimento de uma prancha forte em cada lado do ponto de pivô, como este:  Equilibra-se porque o peso da prancha (“W”) à esquerda do ponto de apoio tenta fazer a tábua tombar no sentido anti-horário, enquanto exatamente o mesmo peso (“W”) tenta derrubá-la uma direção no sentido horário. Ambas as forças de viragem são d vezes W e como elas correspondem exatamente, a prancha não se move. A força de rotação (d vezes W) é chamada de “torque” e, se alterarmos o arranjo colocando pesos desiguais sobre a prancha, o feixe cairá na direção do lado mais pesado:  Com este carregamento desigual, o feixe cairá no lado esquerdo, conforme indicado pela seta vermelha. Isso parece uma coisa muito simples, mas é um fato muito importante. Deixe-me apontar o que acontece aqui. Assim que o peso de um lado do pivô for maior que o peso do outro lado (ambos os pesos estão a uma distância igual do ponto de articulação), a prancha pesada começa a se mover. Por que isso se move? Porque a gravidade está empurrando os pesos para baixo. Um outro ponto é que a distância do ponto de giro também é importante. Se os pesos adicionados "m" forem iguais mas colocados a distâncias diferentes do ponto de articulação, a prancha também tombará:  Isso ocorre porque o maior braço de alavanca “x” faz com que o peso da mão esquerda “m” tenha mais influência do que o peso idêntico “m” no lado direito. Você acha que esses fatos são simples demais para alguém se incomodar? Bem, eles formam a base de dispositivos que podem fornecer energia real para fazer o trabalho real, sem necessidade de eletrônicos ou baterias. As sugestões a seguir para sistemas práticos são apresentadas para você considerar, e se você estiver interessado o suficiente, teste. No entanto, se você decidir criar algo mostrado aqui, por favor, entenda que você o faz inteiramente por sua conta e risco. Em termos simples, se você deixar cair um peso pesado no seu dedo do pé, enquanto outras pessoas podem ser simpáticas, ninguém é responsável por sua lesão - você precisa ter mais cuidado no futuro! Deixe-me salientar novamente, este documento é apenas para fins informativos.  O Gerador de Peso Desviado de Mikhail Dmitriev. Mikhail é um experimentador russo que trabalhou por muitos anos desenvolvendo e testando dispositivos acionados por gravidade. Sua persistência valeu a pena e ele foi muito bem sucedido. Seu trabalho é mostrado no site da Sterling Allanhttp://peswiki.com, onde há vídeos e fotos de vários de seus protótipos. Prevê-se que grandes versões que geram 6 a 12 quilowatts de energia excedente estarão disponíveis para compra em 2011. Cada um de seus vários projetos é baseado no princípio de ter pesos presos a uma roda e arranjar para que esses pesos sejam compensados para fora quando cair e deslocar para dentro quando subir. Por causa dos braços de alavanca diferentes envolvidos, isso dá um desequilíbrio de força que faz com que a roda gire continuamente e se os pesos são de um tamanho considerável, então a rotação é poderosa e pode ser usada para gerar energia elétrica. Para que os pesos sejam compensados à medida que a roda passa, cada peso é suspenso em um braço articulado:  Para que o dispositivo funcione conforme necessário, esse braço de suspensão precisa ser movido para (digamos) a direita ao cair e ser centralizado ou desviado para a direita ao subir. Mikhail optou por usar uma pequena quantidade de energia elétrica para fazer isso acontecer, porque a energia fornecida pela gravidade ao girar a roda supera em muito a pequena entrada elétrica necessária para fazer a roda girar. Vários mecanismos para fazer isso acontecer foram testados como você pode ver na apresentação de Sterling. Um método é empurrar os braços da alavanca para a direita com um simples disco giratório que possui braços defletores anexados a ele:  Depois de receber o empurrão lateral, cada peso fica fora do centro até atingir a parte inferior da viagem. Por favor, lembre-se que enquanto os pesos mostrados aqui são pequenos, um dispositivo de trabalho de tamanho completo terá pesos que pesam um total de talvez 130 kg e as forças envolvidas são então grandes. A imagem acima é um pouco difícil de entender, pois o disco rotativo é transparente e o suporte para os braços rotativos também é transparente. O braço de metal horizontal está lá para apoiar o painel transparente no qual o rolamento da “roda de braços” está montado. Um método alternativo é usar um pequeno motor que aciona os braços diretamente como mostrado aqui:  Cada peso é segurado rigidamente e assim quando o braço motor pressiona contra ele, o braço de alavanca é empurrado para fora sem o torcer do peso para longe do braço do motor. Esses pesos de protótipo não são pesados, mas quando uma unidade de trabalho está sendo construída eles terão um peso considerável, então para obter um arranjo bem equilibrado, pode ser aconselhável ter pesos em ambos os lados da roda para que não haja carga axial compensada. colocado no eixo que suporta a roda:  O arranjo de Mikhail funciona bem quando se baseia no movimento oscilante dos pesos para mantê-los fora do centro durante o tempo em que eles estão caindo e você pode assistir a um vídeo disso acontecendo. No entanto, faz pensar se não seria possível organizar esse movimento sem a necessidade de um motor, embora o uso de um motor seja um método muito inteligente e sensato para garantir a potência rotacional. Talvez se dois defletores estacionários fossem usados, um para manter os pesos para a direita ao cair e um para mantê-los à direita quando subindo, um sistema viável poderia ser criado. Talvez algo parecido com isto:  Evidentemente, as peças do defletor teriam uma forma mais lisa do que a desenhada aqui, mas o princípio é mostrado apesar da má qualidade do diagrama. No caso de pesos pesados, cada um pode ter um rolamento de rolos pressionando entre o peso e a proteção do defletor, a fim de minimizar o atrito à medida que o peso desliza. Alternativamente, a blindagem deflectora poderia ser confrontada com ímanes poderosos que se opõem a imãs similares ligados aos pesos, o que daria um movimento de atrito muito baixo sem contacto. Sistema de Pêndulo / Alavanca de Veljko Milkovic. O conceito de que não é possível ter excesso de energia de um dispositivo puramente mecânico está claramente errado, como foi mostrado recentemente por Veljko Milkovic em seu site onde seu sistema de pêndulo / alavanca de dois estágios mostra uma saída COP = 12 de excesso de energia. COP significa “Coeficiente de Desempenho”, que é uma quantidade calculada pelo mergulho da potência de saída pela potência de entrada que o operador deve fornecer para fazer o sistema funcionar. Por favor, note que estamos falando de níveis de energia e não de eficiência. Não é possível ter uma eficiência de sistema superior a 100% e é quase impossível atingir esse nível de 100%. Aqui está o diagrama de Veljko do seu bem sucedido sistema de alavanca / pêndulo:  Aqui, o feixe 2 é muito mais pesado que o peso do pêndulo 4. Mas, quando o pêndulo é balançado por um leve empurrão, o feixe 2 libras na bigorna 1 com força considerável, certamente força muito maior do que a necessária para fazer o pêndulo. balanço do pêndulo. Como há excesso de energia, parece não haver razão para que ela não se torne autossustentável, devolvendo parte do excesso de energia para manter o movimento. Uma modificação muito simples para fazer isso poderia ser:  Aqui, o feixe principal A é exatamente balanceado quando o peso B está pendurado imóvel na posição “em repouso”. Quando o peso B é ajustado oscilando, ele faz com que o feixe A oscile, fornecendo uma potência muito maior no ponto C devido à massa muito maior do feixe A. Se um feixe D adicional e leve for fornecido e contrabalançado pelo peso E, uma pressão ascendente muito leve em seu movimento para F, então a operação deve ser auto-suficiente. Para isso, as posições são ajustadas de modo que quando o ponto C se move para seu ponto mais baixo, ele apenas direciona o feixe D ligeiramente para baixo. Neste momento, o peso B está mais próximo do ponto C e prestes a começar a balançar para a esquerda novamente. O feixe D sendo empurrado para baixo faz com que sua ponta empurre o peso B apenas o suficiente para manter seu balanço. Se o peso B tiver uma massa de "W", então o ponto C da viga A terá um impulso descendente de 12W no modelo de trabalho da Veljko. Como a energia necessária para mover o feixe D é um pouco pequena, a maioria do empuxo de 12W permanece para realizar trabalhos úteis adicionais, como operar uma bomba. Outros Projetos com Gravidade. Sterling Allan relata o projeto de Bobby Amarasingam, que tem 12 quilowatts de excesso de energia: aqui. Também é relatado por Sterling o projeto do gerador de força de gravidade / momento / gravidade da Smith-Caggiano. O relatório está em aqui Outro dos relatórios de Sterling é na Roda de Gravidade Chalkalis, que pode ser vista em aqui Flutuabilidade Embora estejamos cientes de que a flutuabilidade é usada para converter a energia das ondas em eletricidade, parece que nós negligenciamos a idéia de usar as poderosas forças de empuxo (causadas pela gravidade) como uma ferramenta direta em locais distantes do mar. Isto é definitivamente um erro, porque níveis sérios de energia podem ser gerados a partir de tal sistema. Um desses sistemas é: O Gerador de Energia "Hidro" de James Kwok. Este projeto demonstra mais uma vez, a natureza prática de atrair grandes quantidades de energia do ambiente local. As versões comerciais são oferecidas em três tamanhos padrão: 50 quilowatts, 250 quilowatts e 1 megawatt e parceiros de licenciamento estão sendo procurados. Esse gerador que James desenhou pode ser visto no site Panacea-bocaf.org em www.panacea-bocaf.org e no próprio site de James em www.hidroonline.com ambos com videoclipes explicando como o design funciona. O método é baseado em diferentes pressões em diferentes profundidades de água, gravidade e na flutuação de recipientes cheios de ar. O sistema não depende de vento, clima, luz solar, combustível de qualquer tipo e pode operar o tempo todo, dia ou noite, sem causar qualquer tipo de poluição ou perigo. Esse projeto em particular exige uma estrutura cheia de água de certa altura, uma fonte de ar comprimido e um sistema de polias, e sem querer ser de alguma forma crítica, parece um pouco mais complicado do que precisa ser. Se, ao contrário de James, você não fez a matemática para o sistema, você assumiria que a quantidade de energia gerada por um sistema como este seria menor que a quantidade de energia necessária para fazê-lo funcionar. No entanto, isso está definitivamente muito longe da realidade, já que considerável poder excedente é obtido através das forças naturais do ambiente local que fazem o sistema funcionar. Parte do pedido de patente que James fez é mostrado aqui: SISTEMA DE GERAÇÃO DE ENERGIA HIDRODINÂMICA  A Fig. 1 é uma vista em corte de uma forma de realização do sistema de geração de energia da presente invenção. Aqui, o sistema de geração de energia 10 compreende um recipiente 11 na forma de um tanque de água e um veio 12 que pode rodar em torno do seu eixo longitudinal. O veio 12 está provido de uma ranhura helicoidal de parafuso 13 e está ligado na sua extremidade inferior a um mancal 16 que permite rodar livremente em torno do seu eixo longitudinal. A extremidade superior do veio está ligada a um gerador 17 que é um sistema volante. A energia rotacional do veio 12 pode ser transferida para o gerador através de um sistema de roda dentada 20. Uma cápsula insuflável flutuante 14 é fornecida juntamente com o seu mecanismo de guiamento 15 que está na forma de um arame ou polo para auxiliar no movimento vertical liso da bóia 14. Existe um primeiro reservatório de ar 18 localizado numa porção inferior do recipiente 11 e um segundo reservatório de ar 19 localizado numa porção superior do recipiente 11. O primeiro reservatório 18 retira ar da atmosfera, através da abertura de admissão de ar 21. Uma vez a pressão no primeiro reservatório atingiu um valor predeterminado, um pistão 22 é acionado, forçando o ar através da mangueira 23 para dentro da cápsula flutuante 14 que, quando inflada, começa a se mover para cima através do tanque de água 11, quando a bóia 14 se torna menos denso do que o fluido 25 (tal como água doce ou salgada) no tanque 11. Isto, por sua vez, provoca a rotação do veio 12 e a activação do gerador de energia 17, gerando assim energia. Quando a bóia 14 atinge o limite superior do seu percurso, o ar na bóia pode ser forçado a fluir através de uma segunda mangueira 24 e para dentro do segundo reservatório de ar 19. Quando o ar é removido da bóia, ele se move para baixo através do vaso 11 sob gravidade e com a ajuda de lastro (não mostrado). O movimento descendente da bóia 14, provoca a rotação do veio 12, o qual acciona o gerador 17, gerando assim energia. O ar armazenado no segundo reservatório 19 pode ser ventilado para a atmosfera através de um respiradouro 26 se a pressão no segundo reservatório 19 ficar muito alta. Alternativamente, o ar pode fluir do segundo reservatório 19 para o primeiro reservatório 18 através de uma terceira mangueira 27 de modo que menos ar deve ser sugado para dentro do primeiro reservatório 18 quando a bóia 14 atingir o limite inferior de seu curso e deve ser novamente inflado com ar do primeiro reservatório 18. As mangueiras 23, 24 e 27 são providas de válvulas de retenção 28 para assegurar que o ar flua em apenas uma direção através do sistema 10. A embarcação 11 pode ser provida de ventilação 29 conforme necessário e também pode ser provida de escadas de acesso 30 e uma plataforma de acesso 31 de modo que a manutenção possa ser realizada conforme necessário. O sistema pode também ser provido de um dispositivo de captação de energia solar 32 para gerar pelo menos uma porção da energia requerida para accionar o êmbolo 22 e as válvulas de retenção 28. A energia produzida pelo dispositivo de captação de energia solar 32 também pode ser usada para energizar. uma luz ou farol 33 para indicar a localização do sistema 10.  A Fig.2 mostra uma disposição para a bóia 14 que compreende uma cápsula insuflável 34. Esta figura ilustra a forma das paredes da cápsula insuflável 34 quando insuflada 35 e quando desinsuflado 36. O ar passa para a cápsula 34 através da mangueira 23 e sai da cápsula através mangueira 24. A bóia 14 também tem uma manga 37 ligada a ela. Esta manga tem projecções que engatam na ranhura helicoidal 13 do veio 12, provocando assim a rotação do veio quando a bóia se move relativamente ao veio 12. A manga 37 está provida de lastro 38, tal como pesos de aço inoxidável que ajudam no movimento descendente a bóia quando é esvaziada. A bóia 14 está ligada a um poste de guia 15 e a boia tem um par de braços 39 que deslizam no poste de guia 15 e auxiliam no movimento vertical suave da boia.  A Fig.3 mostra uma versão do primeiro reservatório de ar 18. O ar é arrastado para o reservatório 18 através da entrada de ar 21. O reservatório inclui um êmbolo 22 associado a uma mola 40, estando o êmbolo 22 provido de vedantes 41 para evitar fugas de ar. Quando a pressão, tal como a pressão hidrostática, é aplicada na direção da seta 42, o pistão se move para a esquerda da mola de compressão do reservatório 18 e força o ar para fora através da saída 43. Um motor 44 é fornecido para reverter o movimento do pistão 22. O reservatório 18 pode ser fixado ao piso da embarcação.  Uma construção alternativa do primeiro reservatório de ar 18 é mostrada na Fig.4. Nesta forma de realização, o reservatório 18 está alojado dentro de um recipiente 11 contendo um fluido 25. O ar entra no reservatório 18 através da entrada de ar 21 e é mantido numa câmara 46. O reservatório tem um êmbolo 22 e o movimento do êmbolo 22 para a esquerda de o reservatório 18 força o ar na câmara 46 para fora através da saída de ar 43. O êmbolo 22 é accionado pelo motor 47, que roda o veio 48 helicoidalmente helicoidal. O motor está ligado ao veio por um mecanismo 49 de lingueta e engrenagem, o qual está provido de um vedante 50 na superfície interna do vaso 11. 51, pode ser usado para controlar a abertura e o fechamento de válvulas de retenção 28, bem como a atuação do motor 47. A Fig.5 ilustra uma vista em corte de um sistema de geração de energia de acordo com uma das formas de realização da presente invenção:  A Fig.5 mostra uma forma de realização em que um par de bóias 14 está presente. Cada bóia está associada ao seu próprio veio 12 e pode mover-se para cima e para baixo dentro do recipiente 11, independentemente um do outro. Na Fig.6, é ilustrada uma forma de realização alternativa da presente invenção, em que a bóia 60 tem um método de ligação 61 na forma de uma manga cilíndrica através da qual passa uma corrente guia 62. A corrente 62 é fornecida num circuito sem fim e está localizada num dispositivo de localização superior 63 e num dispositivo de localização inferior 64, sendo ambos polias. A polia superior 63 pode ser fixada a uma parede superior (não mostrada) de um vaso (não mostrado) através de um suporte 65, enquanto a polia inferior 64 pode ser fixada a uma parede inferior (não mostrada) de um recipiente (não mostrado) através de um suporte 66. O mecanismo de ligação 61 contém catracas que engatam nos elos da corrente 62 quando a bóia 60 se move para baixo. Assim, à medida que a bóia 60 se move para baixo, a corrente 62 também se move, fazendo com que ambas as polias superior e inferior rodem no sentido dos ponteiros do relógio. As 64 polias superior e inferior t uma sie de entalhes 67 que correspondem forma dos elos da corrente 62. Desta forma, a corrente 62 fica nas reentrcias 67 e agarra o dispositivo de rastreio (63, 64), assegurando desse modo que o dispositivo de rastreamento (63, 64) gira. Na forma de realização da invenção ilustrada na Fig 6, um veio de trabalho 68 está associado à polia superior 63 de tal modo que a rotação da polia superior resulta na rotação do veio de trabalho 68. O veio de trabalho 68 está localizado substancialmente perpendicular à direcção de deslocamento da bóia 60. O eixo de trabalho aciona um gerador para produzir energia.  A Fig.9 mostra uma concretização alternativa deste sistema de geração de energia 74. O sistema é constituído por um reservatório 75 que tem um compartimento "húmido" cheio de fluido 76 e um ou mais compartimentos "secos" (neste caso, um par de compartimentos secos 77, 78) sem líquido neles. Estes compartimentos secos podem ser fabricados a partir de qualquer material adequado, tal como concreto, aço, fibra de vidro, plástico ou qualquer combinação de materiais. O sistema também tem um par de bóias 79, cada uma com uma construção tipo bexiga desmontável. As boias têm guias 89 que asseguram que as boias se movam suavemente para cima e para baixo dentro do vaso 75. Nesta forma de realização da invenção, os reservatórios de ar 86 estão localizados na base do recipiente 75. O ar entra nos reservatórios 86 através da entrada 87, enquanto o ar que sai da bóia 79 é ventilado através das válvulas 88. O ar ventilado pode ser expelido para a atmosfera ou reciclada para os reservatórios 86. Cada uma das bóias é concebida para ser ligada a uma extremidade de uma corrente ou cabo 80. Um peso 82 está ligado à outra extremidade da corrente ou corda 80. A corrente ou corda 80 tem uma série de polias 81 de tal modo que quando a a bóia é inflada e cheia de ar, a flutuação é maior que o peso 82 e assim a bóia sobe na embarcação. Quando a bóia 79 é esvaziada, o peso 82 é mais pesado do que a flutuação e, por isso, a bóia afunda no recipiente 75. Na concretização ilustrada aqui, os pesos 82 estão localizados nos compartimentos secos 77, 78. Existem várias razões para isto, incluindo que, ao localizar os pesos 82 nos compartimentos secos 77, 78, a velocidade dos pesos 82 no sentido descendente é aumentada e, portanto, um aumento na energia produzida pelo sistema 74 é experimentado. Os pesos 82 estão associados aos segundos cabos ou correntes 83, de tal modo que o movimento vertical dos pesos 82 resulta na rotação dos segundos cabos ou correntes 83 em torno de um par de rodas dentadas 84. Energia rotacional gerada pela rotação das segundas cordas ou correntes 83 é transferido para um dispositivo de geração de energia 85 (tal como uma turbina ou semelhante) para gerar energia (por exemplo, energia elétrica). Apesar de sua complexidade mecânica, o projeto Hidro é oferecido como um gerador comercial com dezenas de quilowatts de potência excedente, indicando que a flutuação é um método significativo de geração de energia, baseado no fato de que a água é centenas de vezes mais pesada que o ar. Devido ao seu peso, o movimento na água é lento, mas pode ser muito poderoso. O método do sulco helicoidal de converter o movimento vertical dos flutuadores em potência de rotação é usado por causa disso, pois tem uma relação muito alta entre as voltas do eixo e o movimento ao longo do eixo. Isso pode ser entendido quando se considera o fato de que uma revolução completa do eixo é causada pelo flutuador subindo apenas um passo para a próxima posição de rosca diretamente acima. A relação de espiras para o movimento de flutuação completo é determinada pelo ângulo do corte da ranhura no eixo de acionamento. Uma outra coisa que precisa ser considerada para tal projeto é o peso da estrutura total quando preenchida com água. O peso total está sujeito a ser muitas toneladas e, portanto, o pé embaixo do gerador precisa ser muito robusto. Além disso, enquanto o ar comprimido é mencionado, dando a impressão de cilindros de ar comprimido ou gás, para operação contínua seria de esperar uma bomba de ar para ser usado. Seja ou não uma bomba de ar, o diâmetro das mangueiras de ar deve ser considerado. A maioria das pessoas pensa que um gás pode fluir ao longo de um tubo ou tubo com muita facilidade. Esse não é o caso. Se você quiser ter uma idéia da constrição causada por um tubo, então pegue um tubo plástico de 6 mm de diâmetro e tente soprar através dele. Nenhuma quantidade significativa de ar passará pelo tubo mesmo que você sopre muito forte. O sitewww.engineeringtoolbox.com mostra esta tabela:  Observe a principal diferença na capacidade de carga de qualquer um desses tubos com apenas a mudança de um comprimento de 10 pés (3 metros) a um modesto comprimento de 6 metros (20 pés), e esses comprimentos são o tipo de comprimento necessário para muitas aplicações. . Além disso, observe os números para, digamos, o tubo de 0,5 polegadas (nominal) de diâmetro. Com apenas 10 pés de comprimento, levaria dois minutos inteiros para bombear apenas um pé cúbico de ar através dele. Segue-se então que tubos de diâmetro consideravelmente maior são necessários para um projeto como o "Hidro". É possível construir uma versão muito mais simples do "Hidro", talvez assim: Um Gerador de Potência de Flutuabilidade Simples.  Um simples gerador hidráulico de potência flutuante pode ser construído, com dois ou mais eixos rotativos horizontais submersos em água, de tal forma que eles sejam efetivamente posicionados um acima do outro. Cada eixo tem uma e, de preferência, duas ou mais rodas dentadas montadas sobre ele. Cada uma destas rodas dentadas engata com uma corrente contínua que também engata na roda dentada que está posicionada verticalmente por cima. Essas alças de corrente vertical formam um suporte ao estilo de correia para uma série de caçambas idênticas. De um lado do cinturão vertical, os baldes têm a face aberta voltada para cima e, do outro lado, as aberturas do balde estão voltadas para baixo. Uma bomba de ar é posicionada diretamente abaixo do conjunto de baldes que têm as aberturas do balde voltadas para baixo. A bomba de ar gera uma corrente de ar ascendente que se acumula nos baldes subindo, deslocando a água que enche o balde. Isso resulta em um poderoso impulso para cima causado pela flutuação desse balde, e o empuxo faz com que o balde se mova para cima, girando ambos os eixos horizontais e trazendo outro balde cheio de água para a posição acima da bomba de ar. Um sistema de engrenagem transfere o binário de rotação assim produzido para um gerador que produz eletricidade para usos de uso geral. Este é um gerador cujo eixo de entrada é girado através da flutuação causada por contêineres cheios de ar submersos em um tanque de água ou algum outro líquido pesado adequado. A rotação contínua e potente do eixo do gerador é produzida através do uso de uma ou mais bombas de ar convencionais disponíveis comercialmente. Uma bomba de ar é usada para encher uma série de recipientes que estão abertos em uma extremidade e que estão presos ao que é efetivamente um arranjo de correia criado por duas alças de elos de corrente fortes que engrenam com rodas dentadas montadas em dois eixos, ou ambos dos quais pode ser utilizado para a extração de energia útil, de preferência para dirigir um gerador de eletricidade, mas não necessariamente limitado a essa função como qualquer torque poderoso tem muitas aplicações úteis. Os objetivos são fornecer um sistema de geração de energia que seja de forma muito simples e que possa ser compreendido, operado e mantido por pessoas com treinamento mínimo. Além disso, um sistema que utiliza componentes que já estão prontamente disponíveis, evitando custos de fabricação significativos, e um que opera sem a necessidade de qualquer tipo de mecanismo complexo ou equipamento de alta precisão e que pode operar com uma ampla gama de produtos comercialmente disponíveis. Fig.1, é uma vista simplificada da seção transversal esquemática parcial mostrando os principais componentes do gerador visto de uma extremidade.  Fig.2, é uma vista esquemática conceitual transversal mostrando a vista frontal do gerador em sua forma mais simples.  Fig.3, é uma vista esquemática conceitual seccional mostrando a vista frontal do gerador onde mais de um conjunto de baldes é usado.  A Fig.4 é uma vista conceptual em perspectiva que mostra disposições para um sistema simplificado de alimentação de ar que opera a partir de cima do tanque. A Fig. 1 ilustra o conceito geral do gerador em sua forma mais simples, onde baldes rígidos leves são usados para capturar o ar ascendente da bomba de ar. Nesta Figura, um tanque de água 1, retém água ou outro líquido adequado 2. A superfície do líquido 3, é indicada para ilustrar o fato de que um balde 10, que está em processo de virar no topo de seu movimento orbital , é posicionado de forma que uma borda do balde fique livre da superfície da água, o que permite que o ar que estava preso dentro do balde escape para a atmosfera e a água encha o balde inteiro causando apenas uma turbulência muito pequena ao fazê-lo . Esta é uma característica desejável, mas não essencial, pois o ar preso em qualquer balde escapará para cima assim que a caçamba iniciar seu movimento descendente, posicionando sua extremidade aberta para cima, embora isso cause turbulência desnecessária dentro do tanque. Uma possível forma de caçamba é mostrada em perspectiva, mas muitas formas de caçambas diferentes podem ser usadas, incluindo tipos flexíveis de membrana ou alternativamente, tipos de placas articuladas que têm resistência muito reduzida a mover-se através da água quando em seu estado colapsado durante seu movimento descendente . Os baldes 8, 9 e 10 estão ligados a duas correntes fortes 30, que engrenam com a roda dentada superior 6, montada no eixo superior 4, e a roda dentada inferior 7, que está montada no eixo inferior 5. Embora não é visível na Fig. 1, existem duas rodas dentadas superiores 6, duas rodas dentadas inferiores 7 e duas alças de corrente 30, embora possam ser vistas na Fig.2. O tanque é suportado por uma placa robusta 14, que por sua vez é suportada por uma série de pilares 15 que assentam numa base segura 16, proporcionando espaço operacional por baixo do tanque para a instalação e manutenção do equipamento de bombagem de ar. Como a água doce pesa 1000 kg por metro cúbico, o peso do sistema gerador operacional é substancial e, portanto, isso deve ser permitido ao avaliar a base necessária para suportar o tanque e seu conteúdo. Enquanto um tanque de parede fina é mostrado na Fig. 1, muitas formas diferentes de tanque podem ser utilizadas, incluindo estilos de membrana de banco de terra e plástico, ou poços de poço abandonados ressurgidos. O tanque da Fig. 1 presume que o eixo inferior 5 é retirado através da parede do tanque 1, usando um arranjo semelhante ao utilizado para os veios de transmissão que alimentam os parafusos de navios e outros vasos de potência. Enquanto um arranjo desse tipo fornece um eixo de acionamento que está convenientemente próximo ao solo, o arranjo muito mais simples mostrado na Fig.2, onde a potência de saída é retirada usando o método muito simples de corrente e roda dentada utilizado para os suportes da caçamba ( corrente 30, e rodas dentadas 6 e 7). Em geral, quanto mais simples e simples for o design, melhor funciona na prática e menor é o custo de manutenção. Referindo novamente a Fig.1, quando activada, a bomba de ar 11 produz uma corrente de ar 12, que flui rapidamente para cima. Esta corrente de ar 12, uma vez estabelecida, não tem que empurrar contra a cabeça de água, pois imediatamente acima do bocal da bomba há uma coluna de ar que se eleva rapidamente, sustentada tanto pela velocidade de saída da bomba 11 como pelo movimento ascendente natural pelos pesos relativos de água e ar (como a água é várias centenas de vezes mais pesada que o ar). Esta coluna de ar normalmente fluiria diretamente para cima em águas calmas, mas se fosse descoberto que a turbulência na água tende a empurrar o ar ascendente para longe de seu caminho vertical, os defletores podem ser colocados ao redor da bomba e posicionados de modo que o fluxo de ar seja forçados a ficar dentro da mesma seção de água ocupada pelos baldes que sobem. O ar que se eleva entra no mais baixo dos baldes e se acumula nele, forçando a água para fora do fundo aberto do balde. Se a caçamba ascendente não estiver completamente cheia de ar antes que a próxima caçamba se mova entre ela e a bomba de ar, o ar retido se expandirá à medida que a caçamba subir e a pressão da água diminuir devido à menor profundidade. Qualquer balde com uma quantidade substancial de ar criará uma força ascendente muito significativa devido à flutuabilidade, sendo o ar cerca de mil vezes mais leve que a água. Cada balde no lado ascendente aumenta a força ascendente e, consequentemente, as correntes 30 necessitam de uma força considerável. O peso dos baldes em cada lado da corrente coincide e, assim, a principal vantagem dos baldes de luz é reduzir a massa inercial das partes móveis. O movimento através da água é relativamente lento, mas isso é compensado pela engrenagem entre o eixo acionador de saída e o eixo de entrada do gerador. A potência do sistema pode ser aumentada adicionando mais baldes na corrente vertical, aumentando a profundidade da água em conformidade. Outras formas de aumentar a potência incluem aumentar o volume dentro de cada caçamba e / ou aumentar a vazão produzida pela bomba de ar ou bombas usadas. Outro método simples é mostrado na Fig.3 e discutido abaixo. Uma alternativa às bombas de ar é usar tanques de um gás comprimido, não poluente, possivelmente ar. Os baldes mostrados nas várias Figuras são formas muito simples e rígidas, possivelmente feitas por um processo de moldagem de plástico para serem baratas, resistentes, leves e permanentemente resistentes à água. Existem, é claro, muitas variações possíveis, incluindo o uso de placas rígidas articuladas seladas com uma membrana forte e flexível, permitindo que as caçambas se dobrem e se tornem aerodinâmicas em seu caminho para baixo, e abrindo assim que elas girarem para iniciar seu movimento ascendente. Existem muitos mecanismos que podem fornecer esse movimento, mas é uma questão de saber se vale a pena sacrificar a extrema simplicidade dos baldes rígidos. A Fig.2 mostra uma disposição esquemática do gerador quando visto de lado. Os mesmos números se aplicam aos componentes já vistos na Fig.1. O arranjo visto na Fig. 2 é o conjunto de balde simples mais simples e básico. Os baldes ascendentes do lado mais próximo 8 obscurecem a vista dos baldes de queda do lado mais distante 9 e apenas a parte mais baixa dos baldes de queda 9 pode ser vista nesta vista. A Fig.1 mostra baldes que são cerca de duas vezes e meia mais longos do que largos, mas esta, evidentemente, é apenas uma opção entre literalmente milhares de proporções possíveis. O tamanho e a forma dos baldes estão relacionados com o desempenho e o número de bombas de ar utilizadas para qualquer conjunto de baldes e essa escolha depende do que está disponível localmente a um preço razoável. Não seria incomum que duas ou três bombas de ar fossem usadas lado a lado ao longo do comprimento do balde 8, embora a Fig.2 mostrasse apenas uma única bomba. A Fig.2 também mostra um método simples para a tomada de força onde uma roda dentada de grande diâmetro 16 é montada no eixo superior 4, e accionando uma roda dentada de diâmetro muito menor 18 que é montada no veio de accionamento do gerador de electricidade 19 que é montado na placa 20, que está fixada de forma segura ao topo do tanque 1. A Fig.3 mostra um dos arranjos possíveis para aumentar a potência do sistema sem aumentar a profundidade da água utilizada. Aqui, os eixos 4 e 5 se estendem o suficiente para permitir que outro conjunto de baldes os conduza, aumentando o torque substancialmente. Enquanto a Fig.3 mostra um conjunto extra de baldes, não há, é claro, nenhuma razão para que não haja três ou mais conjuntos de baldes lado a lado. Deve-se notar, no entanto, que as partições mostradas entre os conjuntos de caçambas não estão lá apenas para reduzir o turbilhão de água, mas são necessárias para suportar os rolamentos que são essenciais para os eixos estendidos, já que sem eles o diâmetro das barras usadas para o os eixos teriam que aumentar muito marcadamente para evitar a flexão indesejada ao longo de seu comprimento. Enquanto o segundo conjunto de baldes foi mostrado alinhado exatamente com o primeiro conjunto, há uma vantagem em compensá-los um em relação ao outro para que o torque de saída seja mais uniforme com os baldes esvaziando e enchendo em diferentes pontos no ciclo do balde. Fig.4. mostra um método para simplificação adicional, onde o ar é bombeado de cima da superfície da água. É uma questão de preocupação para a maioria das pessoas, que a pressão da cabeça de água acima da bomba de ar é um grande obstáculo a superar e será uma força oposta contínua durante a operação do gerador. Se o ar está sendo injetado por baixo do tanque, então, inicialmente, essa cabeça de pressão tem que ser superada. No entanto, uma vez que o fluxo de ar é estabelecido, uma área vertical em forma de charuto de vórtice de água é estabelecida pela corrente de ar ascendente. Este vórtice anular tridimensional anula a cabeça de água na pequena área imediatamente acima do bico de ar, e quase suga o ar para fora da bomba, após a introdução inicial do ar ter sido realizada. Existe outra maneira de conseguir esse efeito desejável sem ter que bombear contra a cabeça total da água, e isso é usar um tubo de ar móvel como mostrado na Fig.4. Inicialmente, a bomba de ar é iniciada e abaixada a uma curta distância na água. A cabeça de água oposta não é grande e o vórtice de água pode ser facilmente estabelecido. O tubo é então baixado muito lentamente, de modo a manter o vórtice a uma profundidade progressivamente menor, onde, apesar do aumento da altura da água, a bomba não precisa ultrapassar essa cabeça. Quando a saída do tubo atinge a profundidade operacional, ele é girado para colocá-lo sob o conjunto de baldes suspensos. A principal vantagem desse arranjo é que o tanque é o mais simples possível, sem possibilidade de vazamento, e os poços abandonados podem ser modificados para se tornarem geradores de energia. Alternativamente, um banco de terra pode ser erguido para formar um tanque acima do solo, possivelmente vedado com uma membrana de plástico. Este método também evita a necessidade de suportar o peso do tanque e da água acima de uma área de trabalho onde a bomba de ar ou os cilindros de ar comprimido estão localizados e mantidos. A criação do vórtice de água pode ser auxiliada pela adição de um capuz ao redor da saída do tubo, como mostrado nesta figura, mas isso é um recurso opcional. A Patente de Flutuabilidade de Ribero. Embora o motor de combustão interna demonstre que uma potência considerável pode ser obtida a partir de movimentos que se movem continuamente para trás e para frente, esse tipo de ação não é muito eficiente, pois há uma inversão contínua dos componentes do acionamento oscilante. Os carros alegóricos no (muito bem sucedido) design de "Hidro" mostrado acima. Um desenho diferente é mostrado na patente de 2011 de Renato Bastos Ribero do Brasil. Aqui está um trecho dessa patente: Aparelhos e Métodos Associados para Gerar Energia Utilizável  Abstrato: A divulgação presente refere-se a um aparelho e métodos associados para a geração de energia, capturando e aproveitando a energia gerada por qualquer quantidade de ar de superfície dentro de água. Em personificações exemplares, o aparelho compreende comprimir um gás de menor densidade em um meio líquido, permitindo que o gás se eleve naturalmente à superfície do meio líquido e, em seguida, Capture a energia gerada pelo gás aplainante.  A Fig.2 é uma vista superior em perspectiva de um disco de rotor para comprimir um gás num meio líquido. Esta divulgação está em dois estágios que, neste caso, trabalham juntos. A primeira fase consiste na criação de energia com a introdução de ar na parte inferior de uma coluna de água. Uma vez introduzido, o ar cria energia quando se move em direção à superfície. A introdução de ar na água é o ponto principal desta primeira parte da divulgação. Um método foi criado para usar uma quantidade muito pequena de energia ao fazer isso. Os dentes no disco, quando girados na água, a água flui para longe da área entre os dentes, diminuindo a pressão e permitindo a fácil introdução de ar nessa área. Sem introdução de ar, a água não se afastaria e a pressão não seria reduzida. O objetivo do cone é espalhar o ar que entra. A segunda secção da presente divulgação refere-se a um sistema com o objectivo de capturar o ar que é inserido no fundo de uma coluna ou tanque de água, enquanto se move em direcção à superfície da água.  Como mostrado na Fig.16, os baldes 2030 descem numa corrente contínua 2020 que passa em torno de uma roda ou polia inferior e superior. Ao alcançar a polia inferior, os baldes giram em torno da polia inferior 2014 e se alinham novamente no lado ascendente da corrente. Imediatamente após girar a polia inferior, cada balde recebe o fluxo de ar ascendente.  A Fig.17 mostra o arranjo no topo do tanque de água 2010. Baldes 2030 subindo devido a serem cheios de ar, vire ao passarem pela polia superior 2018, liberando o ar dentro deles e começando a descer novamente em direção à polia inferior. O eixo superior 2018 tem uma velocidade de rotação estimada de 120 rpm. Na Fig.17 eu (Ribero) estou mostrando a transmissão dessa energia para um eixo no topo da coluna de água onde temos um gerador 2050 exigindo uma rotação de 300 rpm mais um motor conectado a outro gerador com rotação de 600 rpm. Esta parte da Fig.17 é apenas ilustrativa para mostrar que devemos gerar energia no eixo primário a 120 rpm, ou usar qualquer tipo de transmissão para velocidades rotacionais mais convenientes. Acho que as palavras marcadas em vermelho indicam que, embora essa patente tenha sido concedida, o gerador nunca foi construído e é apenas uma idéia. Pessoalmente, eu duvido muito sobre os mecanismos que deveriam reduzir a pressão da água na entrada de ar, já que eu não acho que eles funcionariam, ou se funcionam, certamente não pelos motivos expostos. O que ele quer fazer certamente pode ser feito, mas não da maneira que ele sugere. Se os eixos estão girando a 120 rpm, o que ele sugere, então isso permitiria que menos de um oitavo de segundo enchesse cada balde e enquanto a noção de turbulência de água reduzida através dos baldes tocando um ao outro é atraente, eu não acho que o método descrito é viável. Então, enquanto podemos ter certeza de que os métodos de flutuação são perfeitamente capazes de gerar energia séria, precisamos de um projeto melhor do que qualquer um dos dois mostrados aqui, já que o Hidro parece ser muito caro para construir. O Motor de Trinta Quilowatts. O recente site mostra um motor movido à gravidade capaz de gerar um gerador elétrico de 30 kW. Certamente, esse não é um projeto de construção doméstica, e o custo de construção e o custo de manutenção diário fazem com que isso pareça ser um projeto muito antieconômico. No entanto, uma enorme vantagem da construção desses dois geradores é que eles mostram muito claramente que a energia livre está disponível e perfeitamente viável. As pessoas que constroem essas duas construções apontam claramente que são motores acionados por gravidade e não apenas geradores elétricos. Enquanto esses motores podem conduzir geradores elétricos, é enfatizado que eles também podem executar qualquer tarefa que precise de um motor, como bombeamento, perfuração, etc. O tamanho desses motores é substancial, como pode ser visto nas fotos a seguir:   O Gerador de Torque de William F. Skinner. Em 1939, William Skinner, de Miami, na Flórida, demonstrou seu gerador de quinta geração alimentado por pesos giratórios. Sua demonstração ainda pode ser vista aqui onde ele mostra seu design alimentando um torno de doze pés, uma furadeira e um power hacksaw, todos simultaneamente. O comentarista do noticiário afirma que a potência de saída era “1200% da potência de entrada”, que é COP = 12, mas é altamente provável que ele tenha dito “1200 vezes” em vez de “1200%” porque ele continua afirmando que o projeto permitiria que uma potência de entrada de um cavalo-vapor (746 watts) alimentasse 3.500 residências. Se fosse COP = 12, cada uma dessas 3.500 casas receberia menos de 2,6 watts, o que é claramente errado. Com uma probabilidade muito maior de COP = 1200, cada família receberia, em média, 255 watts, o que seria possível em 1939, quando poucos aparelhos eram elétricos. De qualquer forma, o equipamento impressionante de Skinner poderia ser impulsionado por uma única faixa de acionamento de fios de algodão enquanto alimentava sua oficina inteira. Parecia assim:  Este projeto tem quatro eixos quase verticais, cada um reforçado para dar rigidez adicional. Esses eixos rotativos passam sua potência rotativa para a correia de acionamento de saída mecânica vista à esquerda. Cada um desses eixos rotativos tem um peso pesado na forma de um cilindro espesso e curto montado no alto perto do topo do eixo e o que é provavelmente um peso ainda maior na forma de um longo cilindro mais estreito preso perto da parte inferior do eixo como visto à direita da correia de saída. Esses quatro conjuntos idênticos de eixos com seus pares de pesos giram duas ou três vezes por segundo e produzem toda a potência de saída. Tanto quanto sei, Skinner nunca patenteou seu projeto ou divulgou como funcionava. No entanto, o princípio de funcionamento é muito simples, embora possa demorar algum tempo a compreender como funciona. Você pode verificar isso facilmente para si mesmo se tiver acesso a uma cadeira antiquada com quatro pernas rígidas como esta:  Incline a cadeira para que fique equilibrada em uma perna. Você notará que quase nenhum esforço está envolvido em mantê-lo nessa posição, já que todo o peso é suportado pelo chão através de apenas uma das pernas. Agora, mova a parte superior da cadeira por uma pequena quantidade e mantenha a parte superior da cadeira nessa posição. Você notará duas coisas: primeiro, muito pouco esforço foi necessário para mover a parte superior da cadeira e, em segundo lugar, a cadeira agora gira e fica estacionária no mesmo lado em que a parte superior da cadeira foi movida. Observe duas outras coisas: a cadeira girou por causa de você mover ligeiramente a parte de cima e não a girou, e se a cadeira for pesada, a quantidade de energia na cadeira de balanço é muito maior do que a quantidade de energia que você aplicado no topo da cadeira. Se você fosse continuar a mover a parte superior da cadeira em um pequeno círculo, a cadeira giraria continuamente por quanto tempo você desejasse balançar a parte superior da cadeira. A quantidade de energia na cadeira de fiação é muito maior do que a energia que você está gastando para fazer a cadeira girar. Então, de onde vem essa energia extra? O que está acontecendo é que a cadeira gira sob a gravidade para alcançar o ponto mais baixo possível com a nova posição do topo da cadeira. Mas, antes que ele possa chegar lá, você move o topo da cadeira mais para frente e, assim, a cadeira tem que se mover mais para alcançar o ponto mais baixo. Mas antes que ele possa chegar lá, você move o topo novamente ... A cadeira continua girando e girando, puxada pela gravidade, enquanto você escolher manter o topo em movimento. Mas, não importa o quão pesado a cadeira, muito pouco esforço é necessário de você para causar a fiação. Skinner tinha um mecanismo no topo de cada eixo de acionamento vertical, e esse mecanismo continuava movendo o topo do eixo em um pequeno círculo, enquanto permitia que o eixo girasse livremente em todos os momentos. Isso fez com que os pesos muito pesados ligados ao eixo continuassem girando, e ele usou o poder dos pesados pesos giratórios para alimentar toda a sua oficina. Movendo o topo dos eixos exigia tão pouca energia que ele usou um motor elétrico de 93 watts e para mostrar que ele não estava usando toda a potência daquele pequeno motor, ele usou um único fio de algodão como uma pulseira para mover os topos. dos quatro eixos de saída de potência. Seu mecanismo parece complicado. Isto deve-se em parte ao facto de existirem quatro veios de potência idênticos com os respectivos pesos, montados numa única estrutura compacta e que fazem com que o dispositivo pareça mais complicado do que realmente é. É também devido ao fato de que o sistema mostrado no noticiário é a quinta versão do dispositivo de William. É provável que suas versões anteriores, muito mais simples, tenham funcionado bem e o encorajaram a construir versões ainda mais extravagantes. Existem dois fóruns onde os membros desses fóruns estão tentando descobrir exatamente como sua máquina de versão final funcionou e, em seguida, replicam o design para o uso atual, pois é um sistema limpo para acessar energia utilizável adicional. Esses fóruns estão em: www.overunity.com e www.energeticforum.com É preciso lembrar, no entanto, que não é realmente necessário replicar a quinta versão de William, mas seria suficiente usar o princípio da cadeira giratória para produzir um mecanismo simples em que a potência de entrada é muito menor do que a potência de saída. . Se considerarmos o que está acontecendo, talvez possamos entender o arranjo de aparência complicada de Skinner. Podemos considerar apenas um dos quatro eixos O grande peso está girando em um círculo e esse movimento é usado para alimentar o eixo de saída. A fim de reduzir o esforço necessário para girar o peso, o eixo foi tornado mais fino e quatro hastes de contraventamento foram usadas para apoiar o eixo exatamente da mesma maneira que os mastros de iates à vela são geralmente equipados com “espargidores” para segurar o contraventamento. fora do mastro e assim dar maior rigidez geral. Assim, podemos ignorar essas barras de apoio, pois elas não têm nada a ver com a operação real de seu projeto, mas são apenas sua escolha dentre muitas opções diferentes de construção. Lembre-se da cadeira giratória e considere o que deve ser feito para girar o peso pesado de Skinner. A parte superior do eixo deve ser movida em um pequeno círculo. Olhando de cima para baixo, a situação é assim:  Quando o sistema é desligado, o peso preso à parte inferior do eixo fica diretamente abaixo da parte superior do eixo. Quando o sistema é iniciado novamente, o primeiro movimento é deslocar a parte superior do eixo do eixo em noventa graus ao redor. Este é o início do movimento rotativo e, inicialmente, o movimento é lento, pois leva algum tempo para se movimentar. Para reduzir o esforço de mover a parte superior do eixo noventa graus à frente do grande peso menor, Skinner adicionou um peso na parte superior para auxiliar o movimento nessa direção.  Skinner também aproveitou sua oficina muito grande para usar um mecanismo acionado por correia acima do topo do eixo, a fim de reduzir o esforço de mover a parte superior do eixo do eixo ainda mais (para o nível em que poderia ser conduzido por um fio de algodão). Ele usou quatro veios idênticos em sua construção por dois motivos: primeiro, a potência geral de saída é aumentada e, segundo, as forças laterais que tensionam a estrutura de montagem são combinadas em todos os lados, o que é útil quando você tem pesos pesados em um braço giratório. Skinner fez. Como os eixos de saída parecem estar girando a cerca de 150 rpm, Skinner optou por usar um acionamento mecânico direto. Em 1939, o equipamento movido a eletricidade não era tão difundido como hoje, mas hoje em dia provavelmente preferiríamos ter uma saída elétrica em vez de um acionamento mecânico, embora esse acionamento mecânico pudesse ser usado para acionamento de bombas e outros dispositivos de baixa velocidade. Assim, estamos diante da introdução de alguma forma de engrenagem que pode elevar as 150 rpm para o nível muito mais alto preferido pela maioria dos alternadores. Embora seja possível usar um motor comum de 12 volts como gerador e produzir uma saída elétrica de 12 volts, é provável que seja mais conveniente usar um gerador elétrico pronto para uso, talvez um de baixa fricção. como este que foi projetado para operação de energia eólica e que tem uma saída trifásica de 12V ou 24V:  O fato de que a saída é trifásica pode soar um pouco assustador, mas a conversão para CC é bastante direta:  A saída pode ser convertida em CC com seis diodos comuns ou um arranjo de diodo integrado pode ser usado onde houver uma etiqueta de conexão para cada uma das três saídas e uma tag separada para o CC Plus e para o CC Minus. As correntes envolvidas são bastante altas, uma vez que 400 watts a 12 volts representam mais de 33 amperes e a potência máxima de 500 watts é uma corrente de cerca de 42 amperes. Por essa razão, os blocos retificadores de 3 fases são classificados em 50 amps, o que soa muito alto até que você faça os cálculos e descubra qual é a probabilidade de que a corrente seja. Também deve-se ter em mente que o fio de saída CC tem que carregar esse nível de corrente continuamente e então é necessário um fio bastante robusto. Se a tensão fosse 220V, então o fio transportaria mais de 9 quilowatts naquele fluxo de corrente, e assim o fio normal de 13 ampios não é suficiente e, em vez disso, precisamos usar fio grosso ou mais de um fio para conexões Plus e Minus. Este gerador em particular não é caro e pode gerar 400 watts de eletricidade (33 A) continuamente. Como o tipo Skinner parece estar girando a 150 Hz, uma aceleração da velocidade de saída permitiria maior saída, talvez por um construtor de casas, o arranjo físico poderia ser assim:  Existem, é claro, muitas formas diferentes de construção que podem ser usadas, mas com cada uma delas, a questão é, “como você faz o eixo angulado rodar poderosamente?”. Se você conseguir descobrir as complexidades da quinta versão de Skinner mostrada no noticiário, isso certamente funcionaria. No entanto, preferimos um design muito mais simples e, portanto, não precisamos necessariamente copiar o que Skinner fez, mas em vez disso podemos simplesmente aplicar o princípio que ele demonstrou. Um arranjo possível seria imitar o experimento da cadeira usando um eixo forte com um peso preso a um dos lados, talvez assim:  A versão “A” usa o peso para endurecer o eixo, mas isso eleva o centro de gravidade do eixo e peso combinados, o que pode não ser conveniente. A versão “B” aumenta o torque para qualquer peso, movendo o centro de gravidade do peso para longe da linha central do eixo por meio de braços de extensão. À medida que o eixo gira a uma taxa constante, a carga no eixo será essencialmente constante e não deverá haver nenhuma flexão significativa do eixo, embora ele possa dobrar e permanecer com a mesma dobra durante todo o tempo em que estiver girando, se o o peso é muito alto em relação à rigidez do eixo. Precisamos inserir alguma energia para girar a parte superior do eixo da unidade, mas se organizarmos as coisas em qualquer uma das centenas de configurações viáveis, a potência de saída será massivamente maior que a nossa energia de entrada. Um arranjo alternativo que permite controle de velocidade (e, portanto, controle de potência de saída) é pegar parte da saída de eletricidade gerada e usar isso para alimentar um acionamento elétrico que posiciona a parte superior do eixo de acionamento. Haverá muitas maneiras diferentes de alcançar esse movimento. Um método para fazer isso pode ser:  Aqui, o pequeno motor elétrico mostrado em verde é direcionado para baixo e usado para mover a parte superior do eixo de acionamento a qualquer taxa de revolução que consideramos ser satisfatória, usando um controlador de velocidade de motor CC padrão. Deve-se notar que não importa o ângulo escolhido para o eixo, isso é sempre uma constante em relação ao braço do motor, movendo-o no círculo no topo do eixo. Isso significa que nenhum rolamento de rolos é necessário, pois não há movimento relativo e o eixo assumirá automaticamente esse ângulo fixo. O braço do motor de acionamento movendo a parte superior do eixo provavelmente não será longo, já que Skinner parecia estar movendo a parte superior de seus eixos a cerca de 40 mm da linha central do pivô inferior, fazendo apenas um grau para o ângulo de o eixo em todos os lados da vertical. Naturalmente, não é essencial converter a energia de saída em eletricidade e, em vez disso, ela poderia ser usada da mesma forma que Skinner, dirigindo equipamentos mecânicos como bombas de água para irrigação ou extração de água de poços, operações de moagem para processamento de grãos ou para operar qualquer tipo de equipamento de oficina. Também não é necessário construir o dispositivo em qualquer lugar tão grande quanto Skinner, e versões pequenas podem ser usadas para alimentar sistemas de iluminação, operar ventiladores ou sistemas de refrigeração ou para quaisquer outras necessidades domésticas menores. A potência de saída da máquina pode ser aumentada aumentando o peso preso ao eixo de saída, ou aumentando o comprimento do braço segurando o peso, ou inclinando o eixo de saída através de um ângulo maior (o que aumenta a potência de entrada necessária, mas provavelmente não por muito), ou talvez escalando a coisa toda para que ela seja fisicamente maior. O projeto de Skinner usa reforço de rigidez no eixo de saída, o que sugere que quanto mais leve o eixo, melhor o desempenho. Por causa disso, um protótipo pode usar um eixo de madeira de 33 mm quadrados, pois é leve, muito resistente e rígido, e é uma boa forma para garantir que não haja deslizamento do braço que suporte os pesos. A parte superior do eixo é levemente reduzida para que tenha uma seção transversal circular. Um motor de 300 rpm gira no máximo 5 voltas por segundo e, portanto, é adequado para girar o eixo. Um motor adequado, de baixo custo, desse tipo, se parece com isso:  O motor precisa estar ligado ao eixo de maneira simples, o que garante que não haverá deslizamento do eixo:  Talvez o corte de um orifício de tamanho adequado através de uma tira de material e o uso de uma tira de metal pressionada na face plana do eixo de acionamento do motor (além de o furo ser um encaixe apertado) seja adequado para isso. Um colar ou camada de resina epóxi aparafusada segura a placa firmemente ao motor quando a placa é posicionada abaixo do motor e, assim, a gravidade tende a puxar a placa do eixo do motor o tempo todo. Inicialmente seria assumido que um rolamento de esferas ou rolamento de rolos seria necessário neste braço do motor, mas isso não é o caso, pois o eixo não gira em relação ao braço do motor e enquanto o eixo pode ser um ajuste solto no buraco, certamente não há necessidade de um rolamento. Um Controlador de Velocidade de Motor CC comercial pode ser usado para trazer a velocidade de rotação do eixo gradualmente de uma partida estacionária para a taxa de revolução escolhida:  Usando um módulo comercial como este significa que nenhum conhecimento de eletrônica é necessário para construir um gerador deste tipo. Existem muitas opções para fornecer o peso necessário que impulsiona o gerador. Uma possibilidade é usar um eixo com o maior número de pesos necessários, sendo uma alteração muito simples:  Uma das garras pode ser cortada e usada diretamente como parte da montagem, talvez assim:  Este arranjo simples permite que os discos de peso sejam adicionados e fixados em qualquer combinação desejada. Como os halteres são fornecidos em pares, existem quatro discos de cada lado que permitem uma ampla gama de opções de peso subindo em saltos de apenas 1 kg, o que é muito conveniente. Se o eixo tiver uma seção transversal quadrada, não há tendência para o braço de alavanca deslizar ao redor do eixo Os esboços a seguir não estão em escala, mas uma forma de construção pode ser:   Para este estilo de construção, quatro peças de madeira de borda quadrada aplainada de 70 x 18 mm são cortadas para talvez 1050 mm e duas peças de 33 x 33 x 65 mm epoxied e aparafusadas a duas das peças, 18 mm das extremidades:  Então as quatro peças são parafusadas juntas enquanto descansam em uma superfície plana:  Então os triângulos de suporte de canto do MDF são parafusados no lugar:  Em seguida, uma prancha de 130 x 25 mm de espessura é fixada em toda a largura no ponto central e aparafusada no lugar:  Em seguida, dois comprimentos das madeiras de 18 mm de espessura, com cerca de 180 mm de comprimento, são epoxiados e aparafusados ao centro da prancha de 25 mm de espessura, deixando uma folga de 70 mm na extremidade da prancha:  Duas tiras de madeira com 1350 mm de comprimento, são cortadas e erguidas verticalmente, sendo fixadas por parafusos que sobem através da prancha de 25 mm de espessura, e por triângulos de suporte de MDF em um lado e na extremidade inferior das verticais. Se um nível de bolha for usado para garantir que a madeira vertical seja vertical, primeiro os quatro cantos da estrutura do piso precisam ser pesados para superar qualquer torção e a armação do piso confirmada como sendo na verdade horizontal antes de anexar as madeiras verticais:  Cada vertical precisa ser apoiado em ambos os lados com faixa diagonal, seja metal ou madeirar:  Uma tira de madeira de 18 mm de espessura é aparafusada nos topos das verticais. Isto posiciona deliberadamente a madeira a 18 mm de distância do centro, já que o motor que gira o topo do eixo tem de estar ligado ao meio desta nova madeira e que coloca o eixo do motor muito próximo do ponto central da base:  Uma ligeira desvantagem é que é necessária uma peça de embalagem para as peças triangulares de suporte de MDF que aumentam a rigidez da estrutura no topo:  Nesta fase, a construção ficará assim:  Nesse ponto, o motor de 300 rpm com o braço atuador e a caixa de controle de velocidade podem ser instalados. O motor está localizado centralmente e a caixa de controle pode ser posicionada em qualquer lugar conveniente. A caixa de controle é meramente uma bateria de 12 volts de 1,2V NiMh de tamanho AA conectadas através de um interruptor de pressão para pressionar a máquina e o Controlador de Velocidade de Motor CC comercial, para o motor de 300 rpm. Com esse arranjo, o motor pode ser energizado pressionando o botão e ajustando a velocidade lentamente a partir do estacionário, fazendo com que o peso do rotor se mova gradualmente mais e mais rápido até que sua melhor velocidade de operação seja alcançada. Quando tudo estiver no lugar, a saída retificada do alternador é alimentada na caixa de controle, de modo que o botão Iniciar possa ser liberado e o dispositivo se torne autoalimentado a partir de parte da potência de saída. O passo inicial se parece com isso:  Deve ser explicado que, com exceção da prancha de 25 mm de espessura, toda essa construção é carregada apenas levemente, pois girar a parte superior do eixo não requer muita força ou esforço. Quase todo o peso rotativo está localizado na parte inferior do eixo e esse peso repousa sobre alguma forma de rolamento que fica no meio da prancha de 25 mm. Para uma versão pequena do gerador, como este, o peso rotativo não precisa ser tão grande assim, as forças geradas pelo peso e sua rotação sobre o rolamento não precisam ser uma coisa importante. No entanto, apesar do fato de que estamos lidando apenas com forças limitadas que podem ser manipuladas por componentes simples, as pessoas podem estar inclinadas a usar um rolamento axial em vez de permitir que o peso repouse no eixo do alternador. Um rolamento desse tipo pode ser assim:  Aqui, a base e o anel interno não se movem enquanto o anel externo superior gira livremente e pode suportar uma carga principal enquanto gira. Se escolhermos usar um desses, então um arranjo como este poderia ser usado:  Esta combinação tem uma tampa (mostrada em amarelo) com um eixo vertical central (amarelo) preso a ela, envolvendo firmemente o anel superior do rolamento cujo anel inferior está firmemente preso à prancha de 25 mm de espessura (cinza), talvez usando resina epóxi ( roxa). Isso permite a rotação livre do anel superior e eixo vertical enquanto transporta carga significativa. A tomada de força no arranjo mostrado é do eixo que se projeta abaixo da prancha. De um modo geral, a potência eléctrica aumenta com o aumento da velocidade de rotação, de modo a alinhar o alternador de modo a rodar muito mais depressa do que o veio do eixo é desejável e esta disposição pode ser conveniente para isso. Se for importante ter a tomada de força acima da prancha, um suporte forte pode ser usado para elevar o rolamento o suficiente acima da prancha para conseguir isso. Existem duas forças separadas agindo no rolamento. Um é sempre para baixo, pois o rolamento suporta o peso rotativo:  Depois, há as forças laterais causadas pela rotação do peso (desequilibrado):  Esta força lateral é normalmente considerada um grande problema, no entanto, neste caso, o peso não está sendo girado e tentando escapar do eixo em uma direção horizontal, mas em vez disso, o peso está girando sob a gravidade impulsionado por sua própria peso, e as forças geradas são bastante diferentes e em uma direção diferente. Além disso, a taxa de rotação é muito pequena em comparação com as velocidades nas quais pensamos automaticamente quando consideramos um peso em órbita, normalmente, essa rotação é apenas entre 150 e 300 rpm. Quanto ao carregamento no motor de acionamento do eixo, a situação é assim:  Esta é a posição quando em repouso. A tração no eixo do motor na parte superior do eixo é W x d / h, onde W é o peso na extremidade do braço d. A situação muda imediatamente a parte superior do eixo é girada e o peso W começa a balançar sob a influência da gravidade. Disseram-me que o eixo precisa ser leve. Com pesos pequenos, um eixo de madeira rígido é adequado e não se flexiona sob o carregamento. Tenho certeza de que a parte inferior do eixo precisa de uma junta universal e uma versão principal deste gerador, onde os pesos são muito altos, o que certamente é verdade, pois o eixo será flexionado se for projetado para sua especificação mínima, mas sob esses aspectos muito menos estressados condições, não haverá flexão do eixo quando ele é puxado para o lado e como o ângulo do eixo é uma constante, eu não acredito que qualquer articulação é necessária. No entanto, muitas pessoas vão querer incluir um. Estes rolamentos vêm em diferentes formas, e um deles se parece com isso:  Deve ser lembrado que, se uma junta como esta for encaixada, ela não estará em movimento constante, isto é, as juntas ocuparão uma posição específica e manterão essa posição durante todo o tempo em que o gerador estiver em operação. Um compromisso seria fornecer um movimento articulado em um plano ao girar a junta do eixo logo acima do mancal axial:  As conexões elétricas são bastante diretas:  A bateria de 12 volts de baterias de tamanho AA de 1,2 V é conectada ao controlador de velocidade do motor quando o botão do botão de pressão é pressionado. Isso alimenta o motor e, à medida que o eixo se acelera progressivamente, o gerador começa a produzir energia, que é sempre alimentada à caixa do controlador de velocidade. Assim que o gerador estiver acelerando, o interruptor do botão de pressão pode ser liberado e o sistema funciona com energia produzida pelo gerador. O excesso de energia será extraído da saída do gerador, mas esses links não são mostrados no diagrama. Patrick Kelly www.free-energy-info.com www.free-energy-info.co.uk www.free-energy-info.tuks.nl www.free-energy-devices.com |